

























11
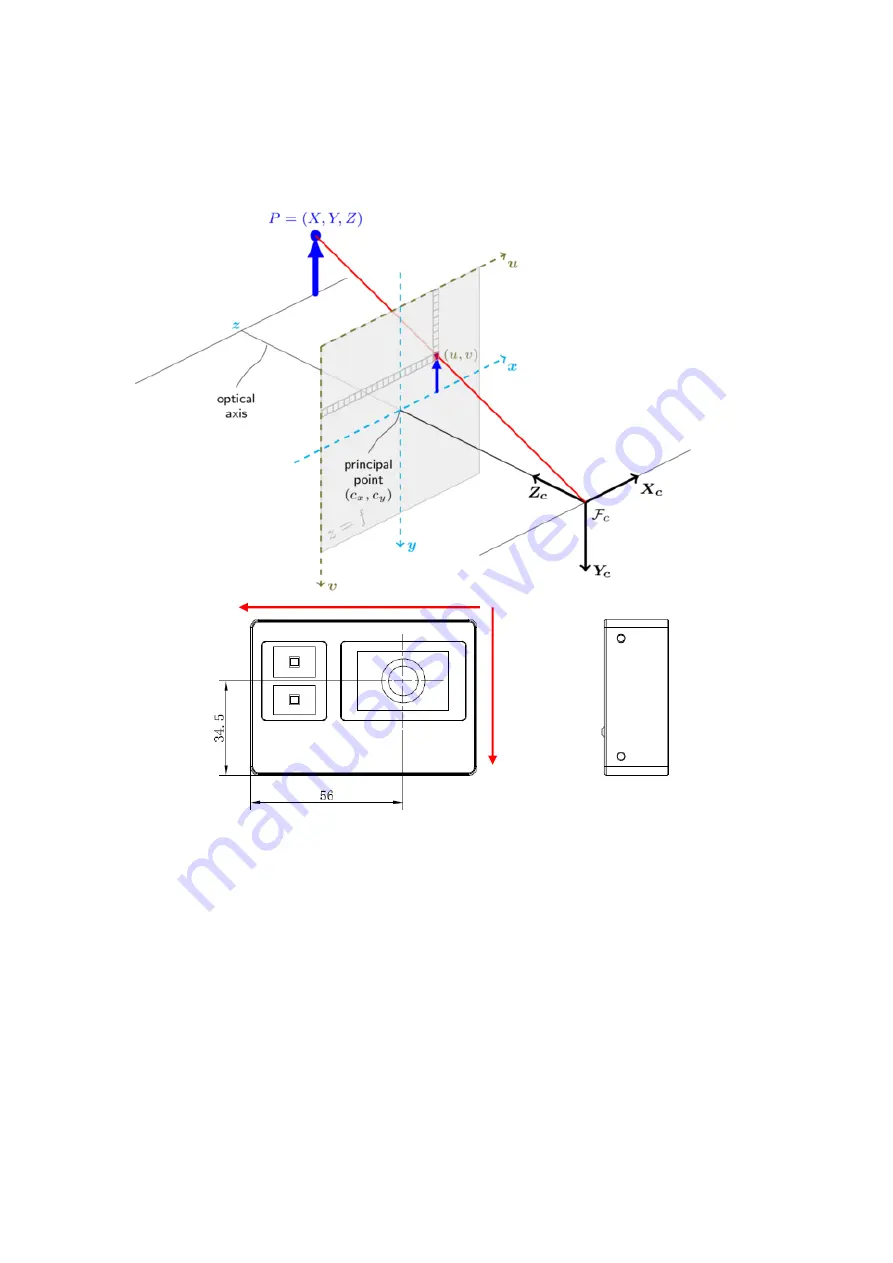
CCS: CCS describe the two-dimensional data, the origin of coordinates is the optic
center.
WCS: WCS describe the three-dimensional information.
The CCS data can switch to the WCS data using the camera internal parameters.
Fig. 3: Origin of the Coordinate System
Meshlab and CloudCompare tools are recommended to analyze the point cloud data
saved by Vzense software or SDK method.
4 Interface with Host
DCAM500 ToF Camera is equipped with Type-B, LED,6pin connector at the back of
its housing as shown in below figure.
For more information about pin assignments and connector types, see the following
sections.
X
Y