





























Description of parameters
vacon • 37
24-hour s358 (0)40 837 1150 • Email: [email protected]
t = Par. ID508
t
par. ID515
NX12K23
Motor speed
Output frequency
DC-braking
RUN
STOP
fout
ID509 ID510
NX12K33
Reference [Hz]
Output
frequency [Hz]
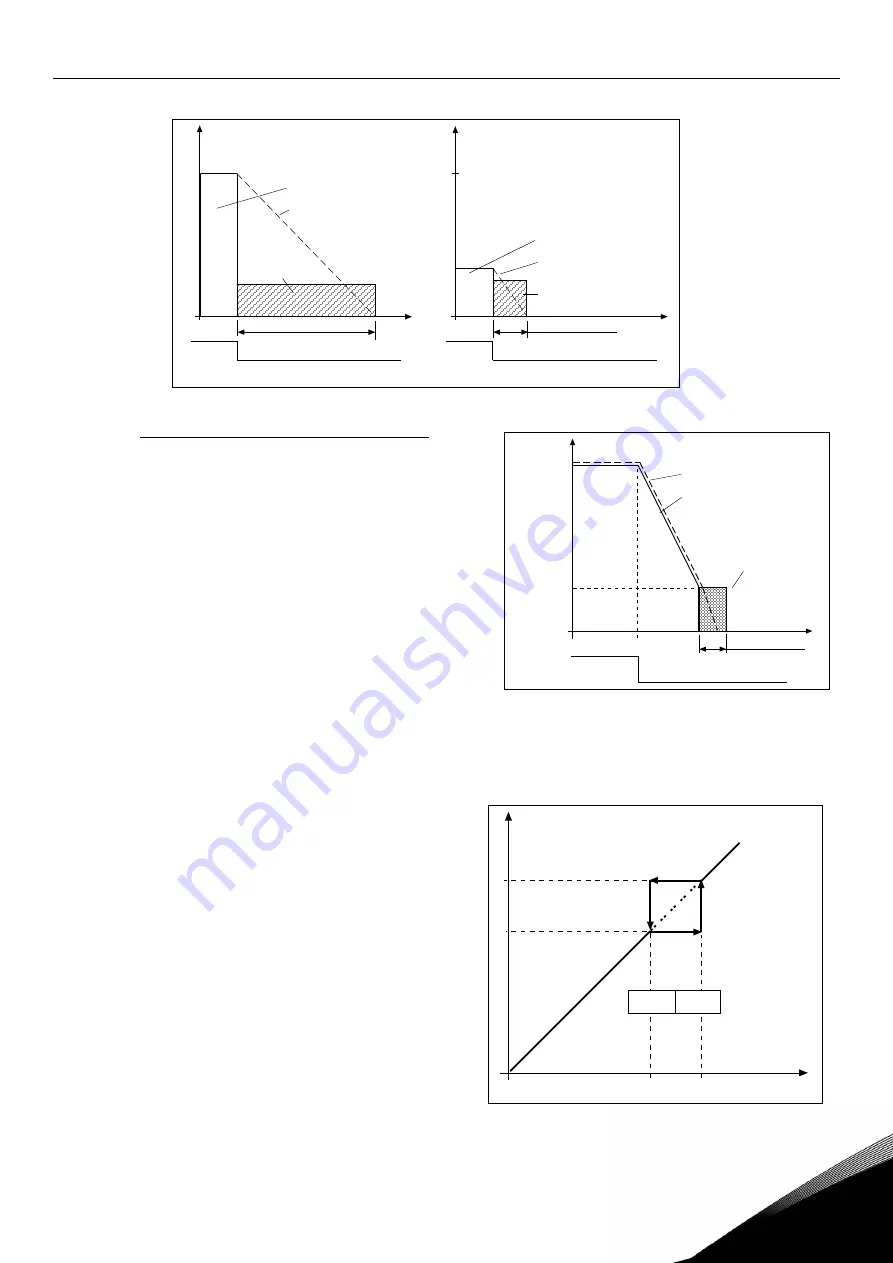
Figure 14. DC-braking time when Stop mode = Coasting.
Par. ID506 = 1; Stop function = Ramp:
After the Stop command, the speed of the
motor is reduced according to the set decel-
eration parameters, as fast as possible, to the
speed defined with parameter
, where the
DC-braking starts.
The braking time is defined with parameter
ID508. If high inertia exists, it is recommended
to use an external braking resistor for faster
deceleration. See Figure 15.
Figure 15. DC-braking time when Stop mode =
Ramp
509
Prohibit frequency area 1; Low limit
(2.5.1)
510
Prohibit frequency area 1; High limit
(2.5.2)
In some systems it may be necessary to avoid
certain frequencies because of mechanical
resonance problems. With these parameters
it is possible to set limits for the "skip fre-
quency" region. See Figure 16.
Figure 16. Example of prohibit frequency area setting.
fn
fn
t
t
t = 1 x Par. ID508
t = 0,1 x Par. ID508
NX12K21
0,1 x fn
RUN
STOP
RUN
STOP
Output frequency
Motor speed
Output frequency
Motor speed
DC-braking ON
DC-braking ON
fout
fout







































































