


















7: GN-MODE
Displays current gain pulse width and flight mode
The Turnigy® V-Bar 600 is capable of flying with four switchable flight modes which are pilot selected from the
transmitter. This is the same process as selecting the gain in your tail gyro but it can configure all the flight characteristics on all
three axes. If you only plan on using one flight mode it is advisable to leave the gain wire off of the installation and move on to
setup.
When setting up the Turnigy® V-Bar 600, you use the transmitter to select which flight mode is being programmed. If you
have the gain channel connected, the pulse width on the gain channel controls which flight mode the Turnigy® V-Bar 600 is in
and which flight mode is being programmed. Simply switching to the desired flight mode will tell the Turnigy® V-Bar 600 to
change values for the selected mode. If the gain channel is not connected you will program Flight Mode 0. If you do not intend
on using multiple flight modes it is best to not connect the gain channel.
Pulse width is used by Radio Control systems to communicate between the radio and receiver the channel value
information. This information below corresponds to the desired servo position, gain value etc. The pulse width for different
radio systems such as FUTABA or JR varies to some extent but is approximately 1-2 milliseconds. Below is a table of the pulse
width ranges acceptable to select each flight mode. The program box can read the pulse width on the gain channel to verify the
flight mode you are in and that your radio is setup properly. Please consult your radio manual for instruction on how to setup
multiple flight modes. A pulse width of approximately 1500 microseconds corresponds to center stick/center servo position.
Flight modes with the Turnigy® V-Bar 600 are set with pulse widths from 1620 to 1919 microseconds.
The values below are only examples. In some cases the radio range may be 0-100 in /- 100%.
You should always check the actual pulse width is correct to get each mode setting by reading the Turnigy® V-Bar 600 data
after the radio is switched to the desired mode
Display Format: XXXX-Y. (E.g.
GN-MODE 1705-1
): Where XXXX is a 4-digit gain channel pulse width in uS
(microseconds). Y is the currently selected flight mode (0-3). Moving the gain switch changes the flight mode. The Turnigy®
V-Bar 600 unit can have up to four different flight modes. The flight mode corresponds to the pulse width of the gain (GN)
channel input.
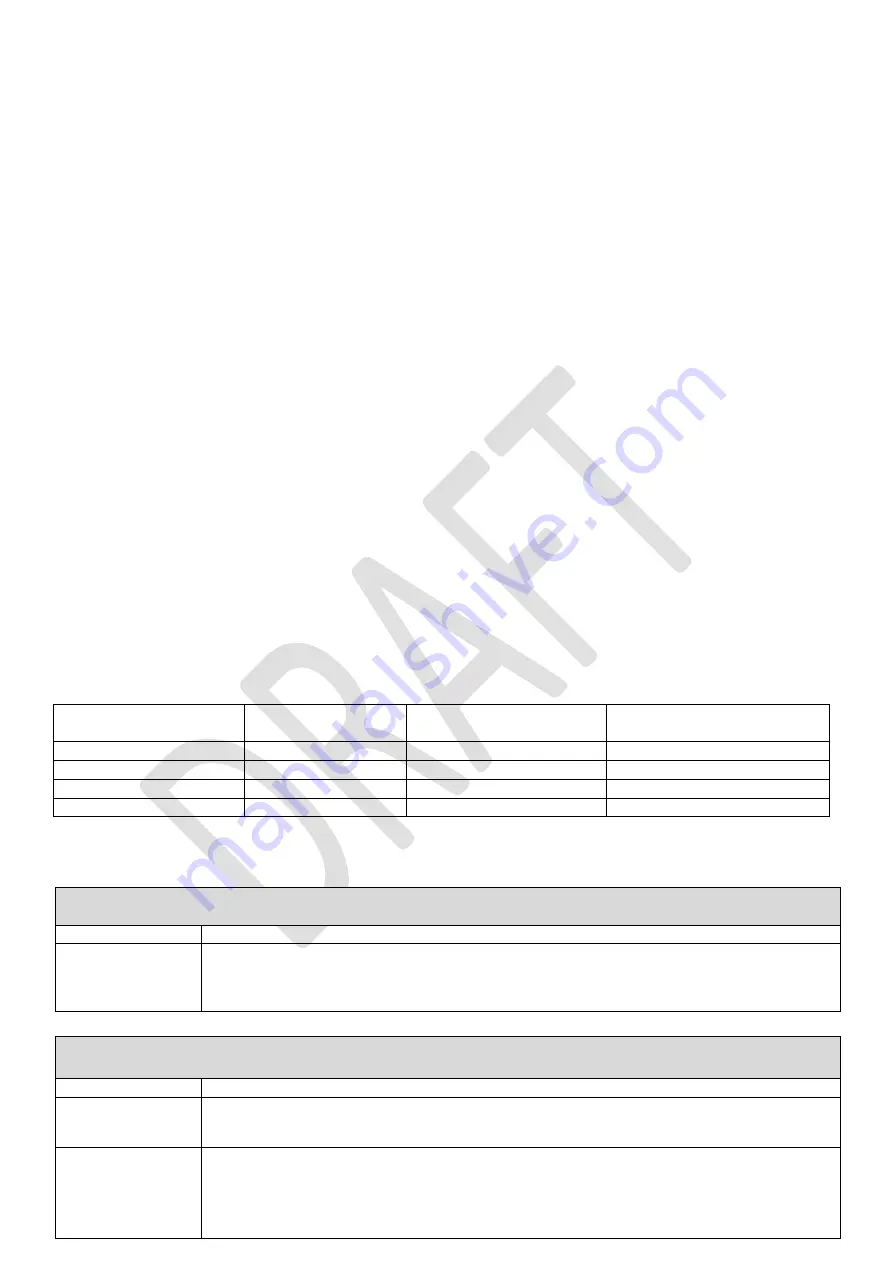
Gain Pulse Width in (uS)
Flight Mode
Futaba 10CHX Gain % Gyro
Sense AVCS Mode
JR 9303 Gain % For Auto Gyro
Sense
Gain<1620 or Gain>1920
0
0-23
0-64
Between 1621 and 1719
1
35
71
Between 1721 and 1819
2
58
84
Between 1821 and 1919
3
81
96
8: TAIL ROTOR PARAM
Submenu Configuration Steps
TAILGAIN - Tail Gain Setting
Menu Item
Description
-80 - +80
(Default 26)
The rudder/tail servo is in normal (rate) mode when the value is less than 0. The rudder/tail servo
is in AVCS (Heading Hold) mode when the value is greater than 0. Default mode is AVCS mode
RUDLSTOP - Rudder Left Piro Stop Gain
Menu items
Description
60 - 180
(Default 100)
The sensitivity of hovering and counter-clockwise yaw. The stop speed used for preventing any
side wind, hovering shift, or counter-clockwise tail rotation.
Suggestion
The sensitivity is RUDLSTOP*TAILGAIN when the hovering, and counter-clockwise rotation
stop. When the ability to prevent side wind is poor, hovering drifts leftward or there is slow
counter-clockwise rotation stopping speed, increase the RUDLSTOP value. If the tail rebounds
when stopping, on counter-clockwise tail rotation, reduce the RUDLSTOP value. This value
should not be varied greatly in any one instance.







































































