


















3: TX CALIBRATION
Submenu Configuration Steps
Ensure all controls are working correctly. In the primary setting mode, apply positive collective pitch. Check whether the
directions of swash plate servos (AILERON, ELEVATOR and PITCH) are correct. If incorrect, the AILERON,
ELEVATOR and PITCH servo direction can be changed via your transmitter – servo reverse. This step needs to be
completed before continuing on.
SWPL TRIM CALIBR - Swash plate Level Calibration at Middle (Mid stick point)
Ensure the unit is in Primary setup mode
Place the collective pitch stick to the exact middle point (Mid stick). Ensure the swash plate is level. This can be changed
mechanically via the swash links or by adjusting the Sub-trim within your transmitter.
Once level, activate the
SWPL TRIM CALIBR
calibration by pressing the appropriate button on the LCD programmer.
The LCD Programmer will display „Calibration OK” once complete.
After this task has completed, any previous AUTOTRIM data in the memory will be deleted.
Return the unit the to normal flying mode.
SWPL LOW CALIBR - Swash plate Low Level Calibration
With the collective pitch stick is at the low end adjust the low end travel of the AILERON, ELEVATOR and PITCH
servos via your transmitter (ATV settings) to set the desired position.
Press the appropriate button on the LCD programmer to activate the calibration.
The LCD Programmer will display „Calibration OK” once complete.
SWPL HIGH CALIBR - Swash plate High Level Calibration
With the collective pitch stick is at the high end adjust the high end travel of the AILERON, ELEVATOR and PITCH
servos via your transmitter (ATV settings) to set the desired position.
Press the appropriate button on the LCD programmer to activate the calibration.
The LCD Programmer will display „Calibration OK” once complete.
4: SENSOR SETTINGS
Submenu Configuration Steps
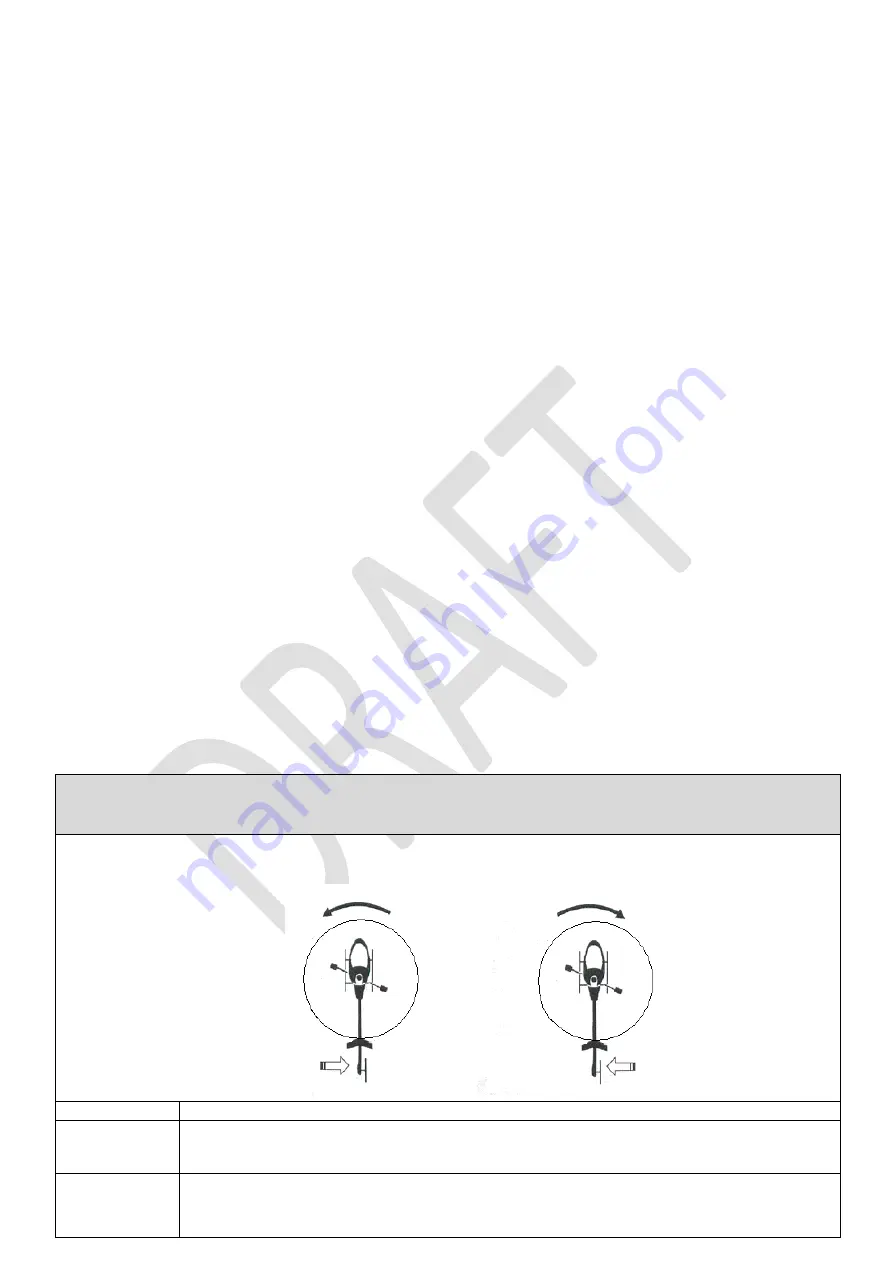
RUD-DIRE - Rudder gyro direction selection
Attention: Check that the rudder direction matches the transmitter stick direction. Otherwise, please reverse the rubber
direction via your transmitter.
Menu items
Description
NORM
(Default)
Rotate the helicopter left (nose). Rudder servo should compensate to the right automatically.
Otherwise, change value to “REV”.
As shown in the diagram.
REV
Rotate the helicopter left (nose). Rudder servo should compensate to the right automatically.
Otherwise, change value to “NORM”. As shown in the diagram.
Direction of resulting yaw
Direction of resulting yaw
Tail rotor thrust
Tail rotor thrust







































































