





























-18-
<Items and set values in positioning operation>
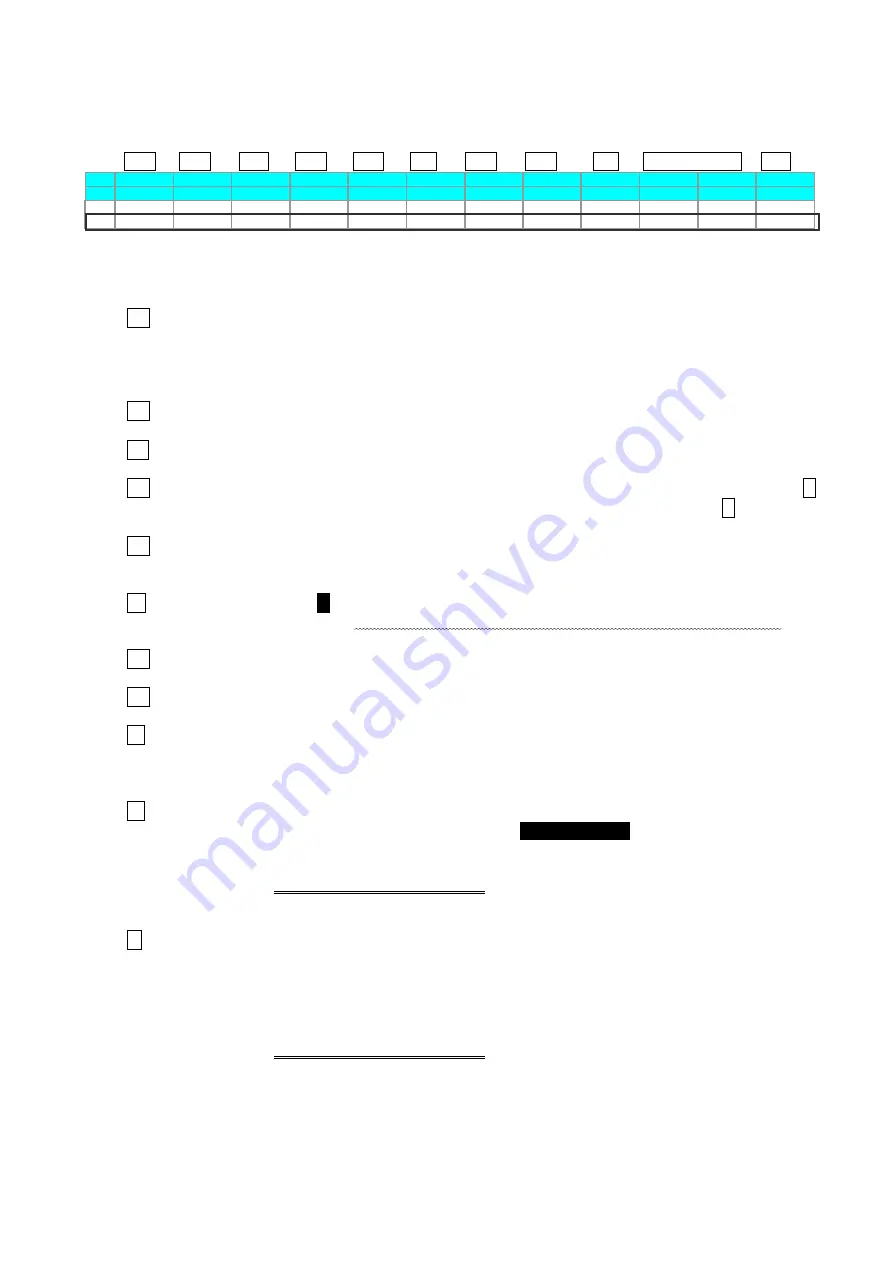
Step No. 1: Positioning operation
a
b
c
d
e
f
g
h
i
j
k
【◎】 要設定項目
・
【○】
必要に応じて調整
・
【×】 変更不要です。
[
◎
] Need to be set - [
○
] Need to be adjusted as required.
[ × ] Not used. Items don't need to be changed in positioning operation.
a <
◎
Movement Method> When the absolute position is required, set Absolute
When the relative position is required, set Relative
→
Absolute: Distance from the origin position. / General setting method
Relative: Feed from the current position. / This is used when simplified data.
b <
◎
Speed> Transfer speed to the target position.
c <
◎
Position> Target position.
d <
○
Acceleration> The parameter which defines how rapidly the actuator reaches the speed set in b .
The higher the set value, the faster it reaches the speed set in b .
e <
○
Deceleration> The parameter which defines how rapidly the actuator comes to stop.
The higher the set value, the quicker it stops.
f <
◎
Pushing force> Set
0.
(If values other than 0 set the operation will be changed to the pushing operation.)
g < × Trigger LV> For pushing operation only. Not applicable for this product.
h < × Pushing speed> For pushing operation only. Not applicable for this product.
i < × Moving force>
Max. Force at the positioning operation.
The force is automatically adjusted corresponding to the load.
Set [100] % at step motor. (Not changeable)
j <
○
Area1, Area2>
This is the condition that turns on the AREA output signal.
The setting condition should be
Area 1<Area 2
.
It is possible to set at relative operation too.
The position will be Absolute (position from the origin).
Example) In case of Step no.1
[AREA] output signal is outputted between Area 1: 0 and Area 2: 2.
k <
○
In position> This is the condition that turns on the INP (in position) output signal.
→
When the electric actuator reaches the range of the target position, the INP
output signal is output.
When it is necessary to output the target position reaching signal earlier, make
the value larger.
Note) Set the value more than [1] (Default)
.
Example) In case of Step no.1
Position: 0 + In position: 1 = [INP] is outputted from the value of 1.
No.
Move M
Spee
Position
Accel
Decel
Pushing F
TriggLV
Moving F
Area 1
Area 2
In pos
mm/s
mm
mm/s2
mm/s2
%
%
mm/s
%
mm
mm
mm
0
ABS
250
50.00
3000
3000
0
0
0
100
48.00
50.00
1.00
1
ABS
250
0.00
3000
3000
0
0
0
100
0.00
2.00
1.00
Pushing S
p







































































