


















19
②
:
“Tool weight without work piece”:
The mass of the air gripper is entered. If there are tools to attach to the robot arm other than the
transferred object, add the mass. The robot performs the optimum operation according to the
entered mass.
③
:
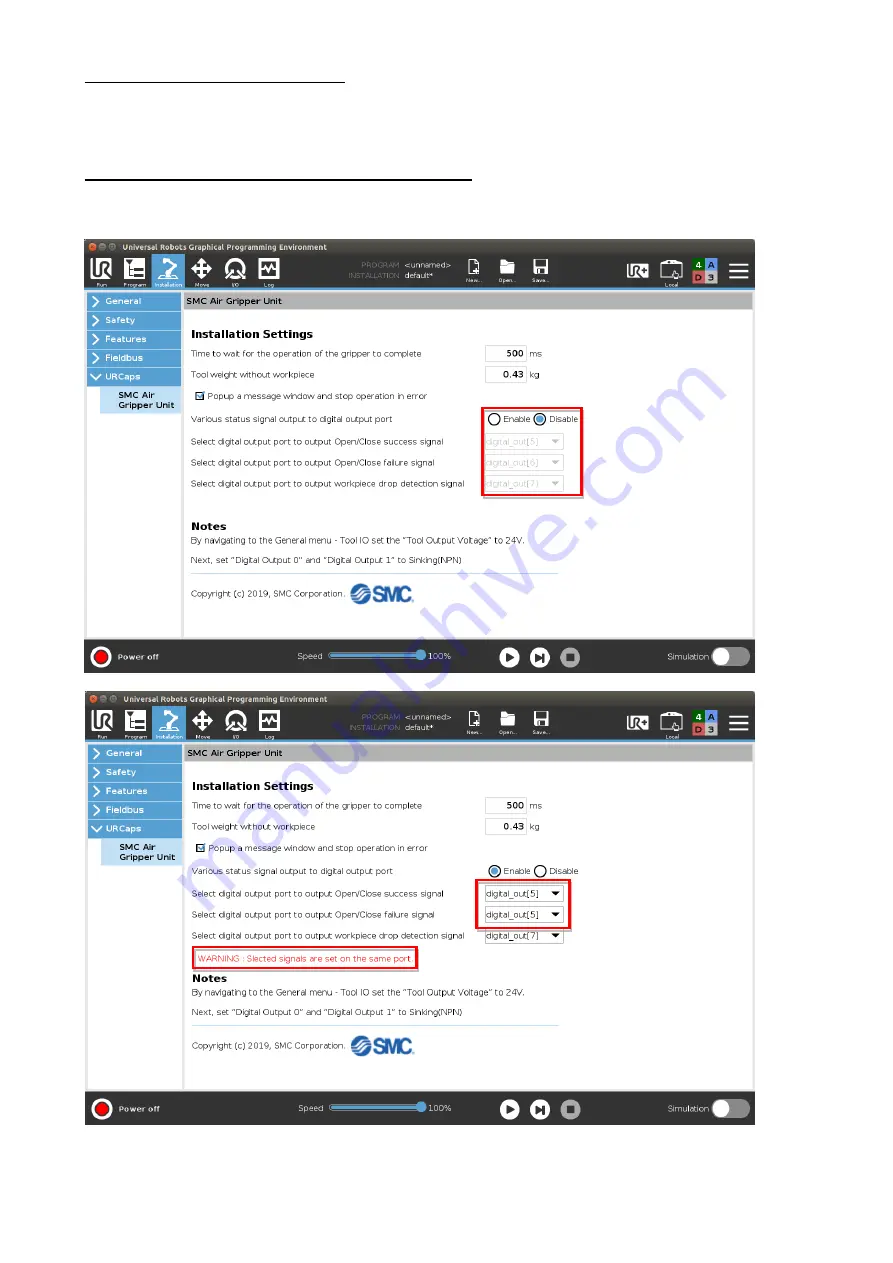
“Various status signal output to digital output port”:
Sets the status of the output port. If "Enable" is selected, the signal for open/close success, failure,
and workpiece drop detection can be assigned to the output port No.5 / 6 / 7, respectively. Select
“Disable” when the output port is not used.
Different signals cannot be assigned to the same port.































































