8015886/YDR0/2014-08-27 •
Subject to change without notice
•
SICK AG
•
Waldkirch
•
Germany
•
www.sick.com
T i M 5 5 x / T i M 5 6 x | S i C K
1
TiM55x
TiM56x
Correct use
The TiM55x/TiM56x laser scanner (referred to as the TiM
below) is intended for use as a non-contact measurement
sensor in standalone operation. It measures radial distances
within a flat surface (circle segment) depending on reflectivity.
The TiM displays the measured values of the recorded envi
-
ronment contour of its scanning angle of 270° over the Ether
-
net or USB interface for further processing as either a one-off
or continuously on request. This requires a corresponding
driver to be created by the user.
The device is designed for portable or stationary use indoors
or outdoors in standalone operation, with a scanning range
of up to 10 m.
The purpose of this instruction manual is to allow you to put
the TiM into operation quickly and easily and to achieve the
first measured value outputs and the first detection results.
Further information on the mechanical and electrical instal-
lation as well as on the measured value output is available in
the
&
Technical Information
(Nr. 8015883). This information
is available for download on the TiM product page
(www.
mysick.com/en/tim5xx).
Safety information
• Read these instructions before commissioning the TiM
in order to familiarize yourself with the device and its
functions.
• The TiM corresponds to laser class 1 (
see
• Mounting and electrical installation are to be performed
only by qualified technicians.
•
Electrical connections between the TiM and other devices
may only be created or fixed when there is no power to the
system. Otherwise, the devices may be damaged.
• Conducting cross sections of the supply cable from the
customer's power system should be designed in accor-
dance with the applicable standards. Secure the TiM with
an external 0.8 A slow-blow fuse at the start of the supply
cable, from the perspective of the supply voltage.
• All electrical circuits connected to the TiM must be imple-
mented as SELV electrical circuits (SELV =
S
afety
E
xtra
L
ow
V
oltage).
•
Use the device only under permitted environmental
conditions (e.g. temperature, grounding potential,
see
•
Turn the swivel connector unit with the electrical connec
-
tions max 180° from end position to end position.
•
Protect the TiM against moisture and dust when the cover
to the USB socket is open. The black plastic cover must
be screwed flush in order to comply with enclosure rating
IP 67 in operation.
•
Opening the screws of the TiM housing will invalidate any
warranty claims against SICK AG.
• The TiM does not constitute personal protection equip-
ment in accordance with the respective applicable safety
standards for machines.
Commissioning and configuration
Step 1: Electrical installation
1. Connect the communication interface of the TiM to the
PC (Ethernet or USB; recommended Ethernet, 4-pin M12
outlet).
>
If using a USB, connect the TiM's Micro USB port (behind
the black plastic cover on the side) to a free USB port (type
A) on the PC using a suitable shielded high-speed USB
cable (e.g. no. 6036106, 2 m).
The USB cable may not exceed 3 m in length!
When operating the USB interface, ESD/EMC interfer
-
ences can lead to an interruption of the USB connection.
To continue with the data transfer, disconnect the USB
cable from the TiMand reattach it to establish contact. To
re-establish communication between TiM and PC in the
SOPAS communication software, select
C
ommuniCation
>
G
o
o
nline
.
2. Turn on and start the PC.
Provide power to the TiM (5-pin M12 plug).
Using the power supply unit it must be ensured that the
supply voltage does not drop below 8 V for longer than 2
ms and never rises above 30 V.
Following successful initialization, the green LED lights up
"
▸
" (device ready for operation).
SOPAS
SOPAS
„Power/Out“
„USB 2.0“
Configuration
Diagnosis
TiM
Connection
box
USB
USB
Driver for request of
measurement values
and further data
processing
SYNC/
Device Ready
„Ethernet“
Ethernet
Ethernet
DC 9 ... 28 V
delay-
action
fuse
0,8A/T
Measurement mode: Electrical block diagram for commissioning
Step 2: Mounting and alignment
NOTE
During installation make sure there is no reflective surface
behind the reference target
see
â
.
1. Optional: mount the TiM to separately ordered mounting
accessories (mounting kit 2), see "Mounting" Chapter in
the
&
Technical Information
(Nr. 8015883).
2. Otherwise, mount the two straight plates from the
enclosed mounting kit 1 on the TiM using two M3 screws.
Use the two blind-hole threads either on the underside or
back of the housing (
see
.
If the straight plates are not used, screw the screws provid
-
ed by the customer max. 2.8 mm into the thread
.
3. Mount the TiM on a prepared bracket.
The device should be as free from shock and vibration as
possible during operation (e.g. using vibration dampers).
4.
Align the 90° axis of the TiM's scanning angle with the
center of the area to be monitored. The marking on the
lid of the optical hood serves as a bearing alignment aid
(
“Device overview Page 3”, point
ã
).
Ranging Laser Scanner
Short Range
O P E R AT i N G i N S T R U C T i O N S
en
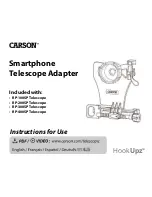
Range diagram for TiM
Step 3: Commissioning/Configuration
a. Installing and launching the SOPAS configuration
software
The SOPAS configuration software is used as standard to dis
-
play the surrounding contour (measuring line) recorded by the
TiM, as well as diagnostic information in the event of an error.
1.
Download and install on the PC the software from the
website “
“, software type
SOPAS ET. In this case, select the "Complete" option as
selected by the installation wizard. Administrator rights
may be required on the PC to install the software.
2. Start the "
SOPAS
" program option after completing the
installation.
Path: Start > Programs > SICK > SOPAS Engineering Tool
> SOPAS.
3.
Establish communication between SOPAS and TiM via the
wizard that has started automatically: Select
ConneCt
to
a
new
deviCe
.
4.
Follow the steps in the Connection Wizard until the
F
ound
deviCes
window.
5.
Select the appropriate TiM from the list of available
devices:
0
Scanning range in m (feet)
Scanning range in m (feet)
0
Scanning range max. 10 m (32.81 feet)
Scanning range typical 8 m (26.25 feet)
for objects up to 10 % remission
180°
‒45°
225°
270°
90°
0°
6
(19.69)
6
(19.69)
2
(6.56)
2
(6.56)
2
(6.56)
2
(6.56)
6
(19.69)
10
(32.81)
14
(45.93)
10
(32.81)
14
(45.93)
6
(19.69)
14
(45.93)
14
(45.93)
10
(32.81)
10
(32.81)