




















6
Manual – MOVIDRIVE® MDX61B MOVI-PLC® DHP11B Control Card
2
Introduction
Communication
interfaces
The DHP11B control card is equipped with numerous communication interfaces.
The two system bus interfaces CAN 1 and CAN 2 are used primarily for connection.
They serve for controlling several drive inverters and for integrating decentralized I/O
modules. This module can be operated via a PROFIBUS slave interface with a higher-
level controller.
The RS485 interface is used as an engineering interface, to connect terminals or to con-
trol other frequency inverters.
Automation
topology
Use as a standalone machine controller
You can use the DHP11B control card as the control unit for a complete machine.
When no master PLC is used, the DHP11B control card takes over all control tasks. This
means that the DHP11B controls drives and other actuators and evaluates decentral-
ized inputs and outputs.
In this type of standalone topology, operator terminals (DOP11A) function as the inter-
face between the operator and machine (HMI functions). The operator terminals
(DOP11A) come equipped with an integrated web server and act as an interface to the
company’s Ethernet network.
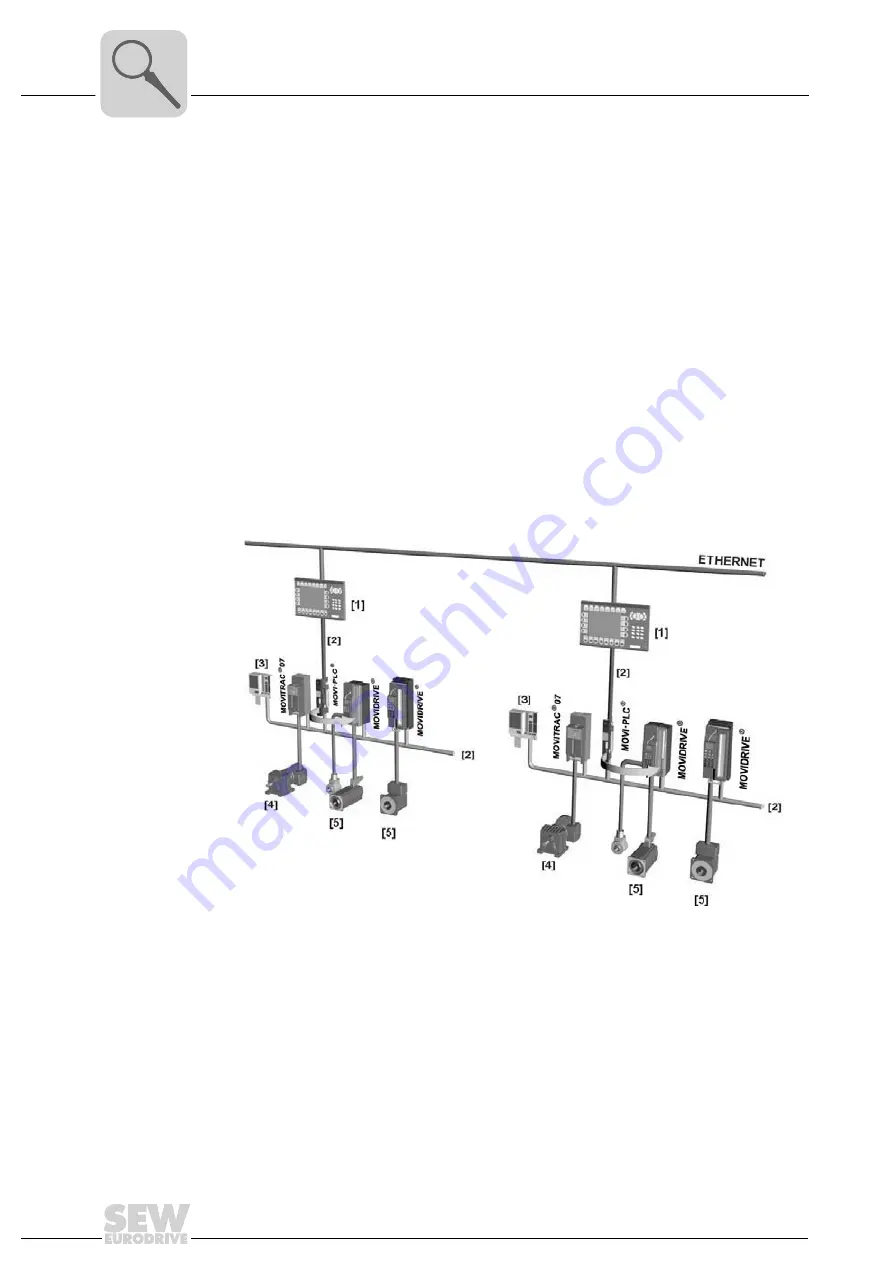
20071AXX
Figure 1: Example of a topology when using the DHP11B control card as the standalone control
for a complete machine
[1] Operator terminal (e.g. DOP11A drive operator panel)
[2] System bus (CAN 1, CAN 2)
[3] Inputs and outputs (terminals)
[4] Asynchronous motor
[5] Synchronous servomotor / asynchronous servomotor





















































