





























Modbus MFU Option Card Installation Manual
58 of 76
Publication PUB091-003-00_0119
8.1.3
Deadband and Hysteresis (Registers 10 and 14)
When using position control by sending a value to the Actuator Position DV setpoint there are a
number of parameter registers used to tune the position controller and reduce the possibility of
damage to the actuator. These two registers are set to prevent hunting around the setpoint due to high
inertia of the valve. They will require adjustment for each specific application. In addition, the Motion
Inhibit Timer is used to ensure the actuator does not carry out an excessive number of starts in a
given period.
Deadband
The control used for the positioner is proportional only. The MFU will
run the actuator to the desired position and then it stops. As the
actuator and valve combination have some inertia there is a possibility
that the desired position may be overrun and the positioner will then
reverse the direction of travel to make the valve adopt the desired
position. This overshoot and return may continue for a number of
cycles and is known as hunting, the valve and actuator combination
will hunt around the setpoint if the inertia is high. To prevent this from
happening there is a Deadband setting whereby once the actuator
enters the deadband the motor will be stopped. For example a 5%
deadband will cause the motor to be stopped once the actual position
is within 5% of the desired position. The inertia will then bring the
actual position nearer the desired position.
The deadband is the allowable error around the setpoint.
Hysteresis
In addition to the deadband a second setting, hysteresis, further
refines the performance of the position controller. The positioner will
run the actuator towards the setpoint DV until the actual position is
within the deadband minus the hysteresis setting. This has the effect
of instructing the actuator to stop when it is nearer the DV. The
actuator will not restart unless it overshoots and runs outside the
deadband or a new command places the new desired position outside
the deadband.
The Hysteresis is the amount of movement inside the deadband
permitted before the motor stops.
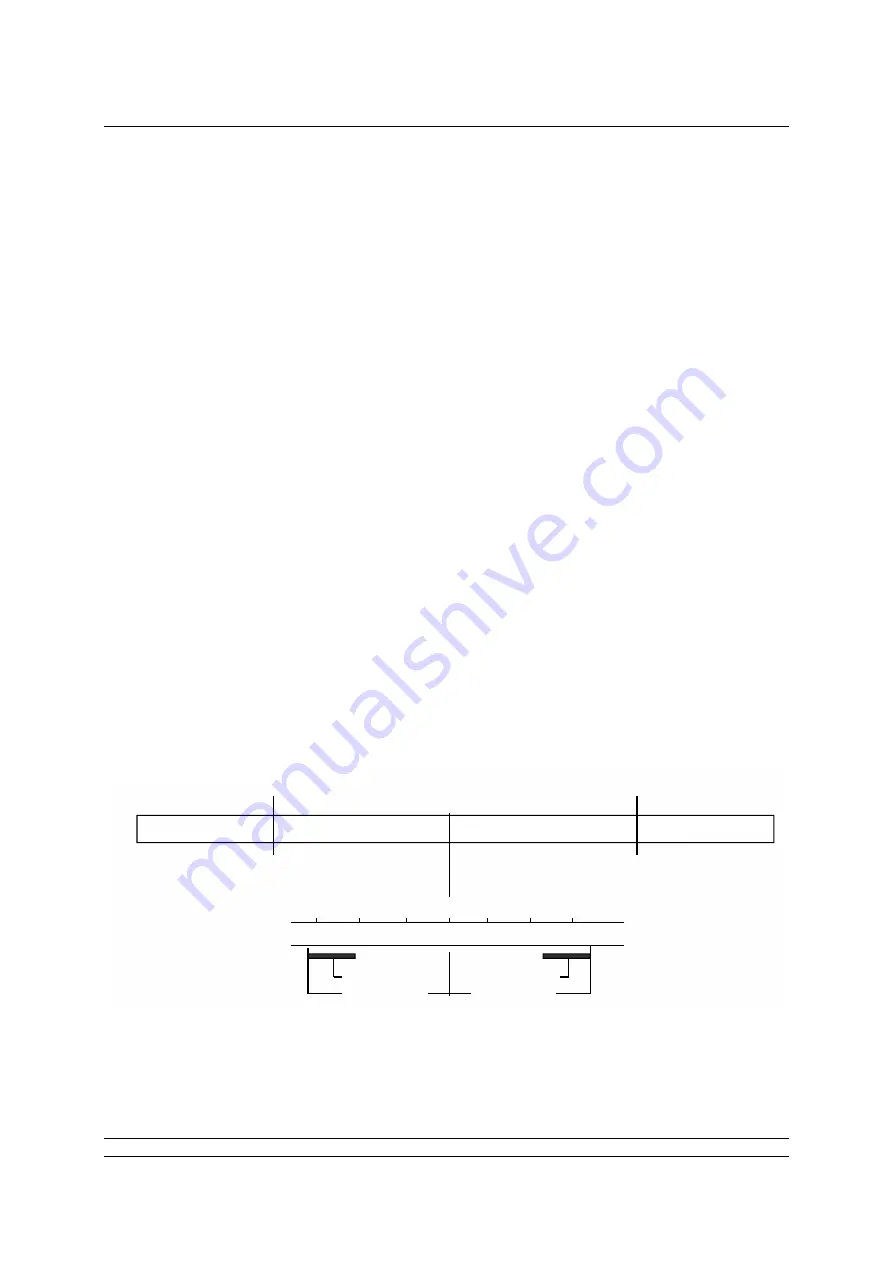
0%
Setpoint DV = 50%
100%
Valve Stroke
Position MV = 50%
47% 48% 49% 50% 51% 52% 53%
.
Hysteresis
Hysteresis
Hysteresis = 1%
Deadband
Deadband
Deadband = 3%
CLOSED
OPEN
Position Minimum Setting
Position Maximum Setting
Fig 27: Deadband and Hysteresis settings







































































