





























34
Rockwell Automation Publication 750-AT006D-EN-P - January 2022
Chapter 2 Product Features
Acceleration Feedback
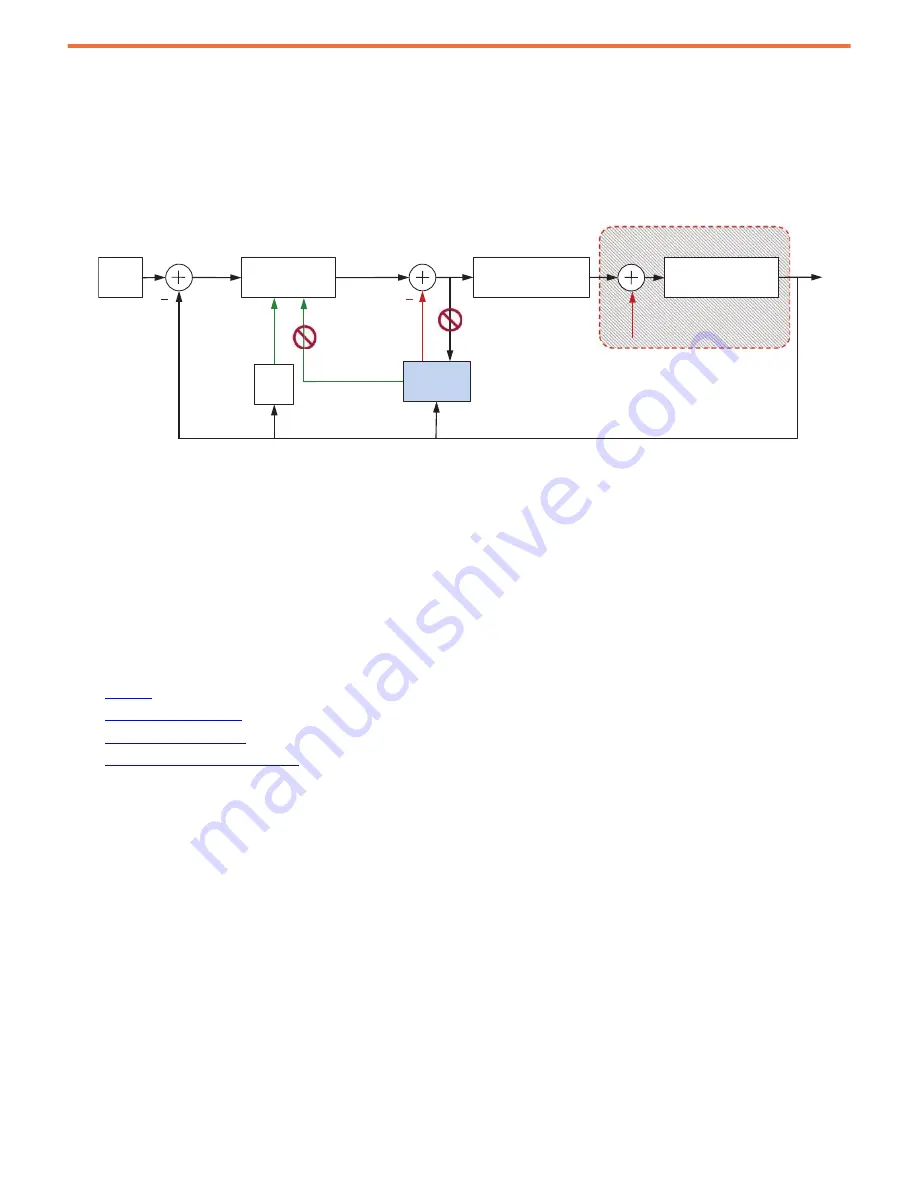
10:2020 [LdObs Mode] = Accel Fdbk (4) – This mode functions equivalent to the legacy Inertia Adaption. It compensates for some loads that
are connected to the motor, providing disturbance rejection and dynamic stiffness. However, the aggressive behavior often requires the
observer bandwidth to be decreased for stable operation. This mode applies the Torque Estimate signal to the control loops but not the
Velocity Estimate signal. The velocity regulator uses the default filtered Velocity Feedback instead of the Velocity Estimate. The Torque
Estimate signal consists of filtered acceleration feedback.
Figure 34 - Acceleration Feedback Configuration
Adaptive Tuning
The adaptive tuning feature is an algorithm inside the drive that continuously monitors and, if necessary, adjusts or adapts the various filter
parameters and control loop gains to compensate for the unknown and changing load conditions while the drive is running. The primary
functions of adaptive tuning are:
•
Monitor motor side resonances
•
Automatically adjust torque loop notch and low pass filter parameters to suppress resonances
•
Automatically de-tune control loop gains to avoid instability when it is detected
•
Automatically up-tune control loop gains for best performance
This section includes:
•
•
•
•
Adaptive Tuning Modes on page 40
Benefits
When adaptive tuning is enabled with recommended out-of-box control loop settings, adaptive tuning does the following:
•
Automatically suppresses continuously changing resonances
•
There is no need for periodic identification of resonances and retuning
•
There is no longer the need for a tuning expert
•
There is no need for periodic retuning of filters over time
•
Reduces commissioning time, especially for high drive count
•
Minimizes tracking error, machine vibration, and power consumption
•
Allows bandwidth and line speeds to be increased
•
Provides tighter control of moving parts, which reduces wear and saves on material costs
System Under Control
Load
Observer
Power Converter
Control Loops
Fs
Unloaded Motor
Acceleration
Reference
Torque
Estimate
Velocity
Estimate
Position
Feedback
Torque Load
P
REF
Velocity
Feedback
Filter
A







































































