





























Rockwell Automation Publication GMC-RM002F-EN-P - June 2013
25
Wiring Your Kinetix Safe Torque-off Drive
Chapter 3
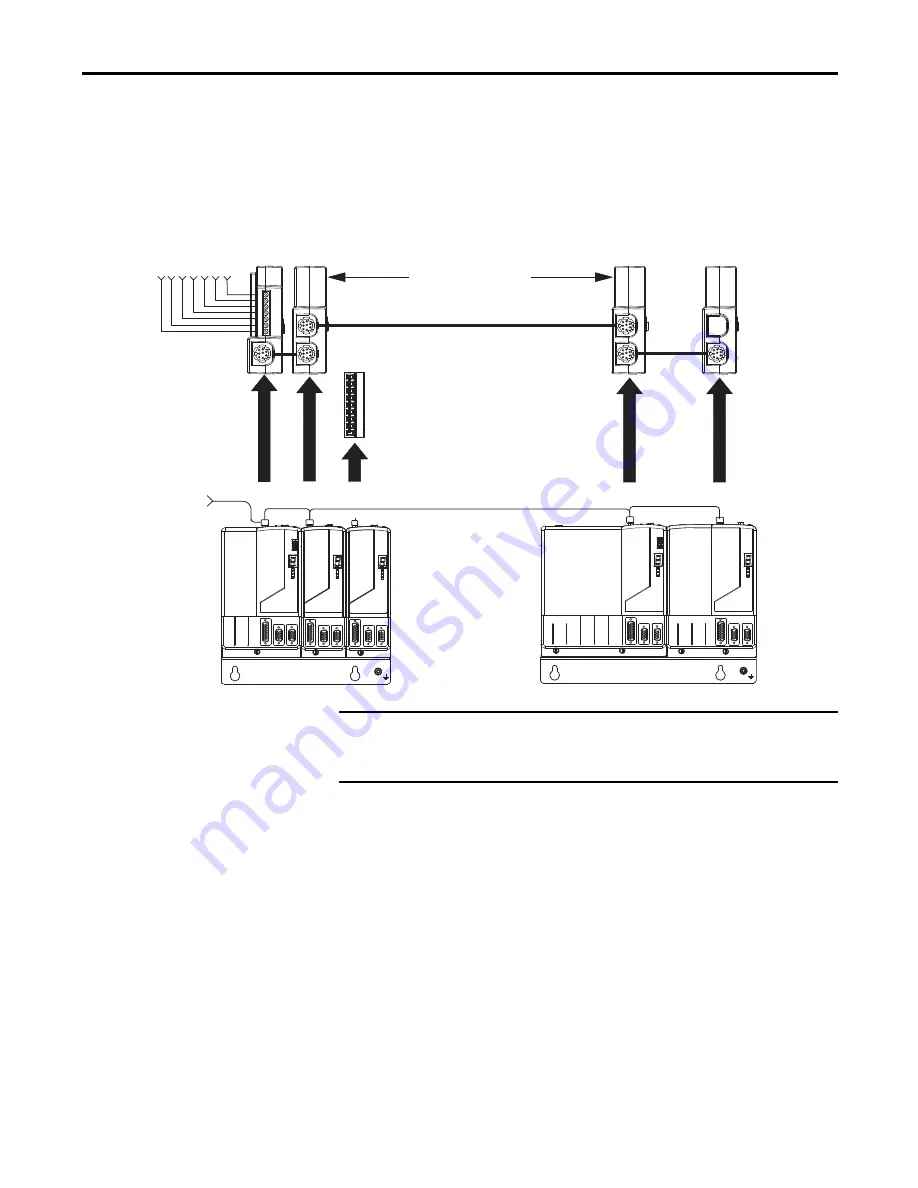
In this example, system 1 contains two (single-wide) Kinetix 6000 drives using
the safe torque-off feature wired with two (double-wide) Kinetix 6000 drives in
system 2. The wiring headers with motion-allowed jumpers have been replaced as
shown. The third axis in system 1 does not use the safe torque-off feature, so the
wiring header and motion-allowed jumper remain installed.
Figure 14 - Typical Kinetix 6000 Safe Torque-off Configuration
Cable connections to middle-drive headers (catalog number 2090-XNSM-M)
can be made to either connector. Input and output is not specified.
1202-C10
1202-C02
1202-C03
1 2 3 4 5 6 7 8 9
Safe Torque-off
Control Circuit Connections
Wiring Plug Header with
Motion-allowed Jumper
Middle-drive Headers
(2090-XNSM-M)
Kinetix 6000 Drives
System 1
Last-drive Header
(2090-XNSM-T)
First-drive Wiring Header
(2090-XNSM-W)
Kinetix 6000 Drives
System 2
Drive-to-Drive Safe Torque-off Cables
IMPORTANT
Due to the current capacity limitation of the safe torque-off cable connectors,
multiple safe torque-off drive configurations must not exceed eight
Kinetix 6000 or Kinetix 7000 drive modules.







































































