




















6
5. Operating Principle
The quarter-turn actuators PSQ-AMS are designed for the use as electric valve actuators. Mounting to the valve is
done by a mounting flange as per ISO5211, plus an exchangeable drive bushing with an inside contour as per the
valve shaft.
Mechanical power is created by a 24 volts DC-motor which is controlled from the electronics via pulse width
modulation (PWM). Absolute encoded feedback comes from a precision potentiometer. The motor torque is
transmitted through a reducing spur gear to a planetary gear set. Output is a centre gear with a multi-toothed inner
profile to accept the drive bushing.
During power failure and adjustment work the actuators can be emergency-operated via the hand wheel (see
chapter 6/Manual Operation), except when using the fail-safe unit PSCP.
6. Manual Operation
A hand wheel is provided to operate the actuator in case of power failure or for valve adjustment.
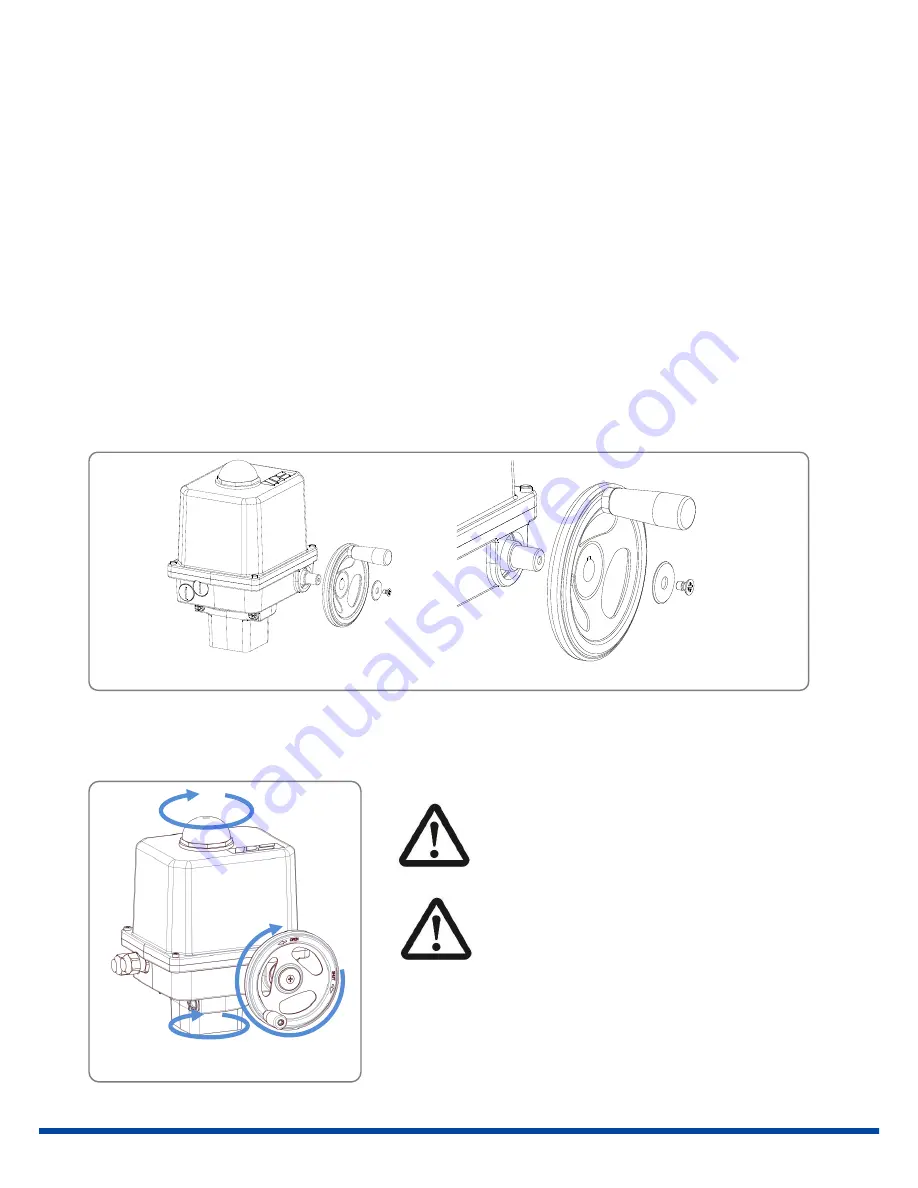
PSQ-AMS actuators are supplied with hand wheel loosely added. Before operation it has to be fitted as shown below.
Figure 3: Mounting the hand wheel
The hand wheel on a worm shaft drives the entire planetary gear set. In motor operation, it is standing still, but is
available in any position without need for clutching. Turning the hand wheel clockwise turns the output clockwise as
well, viewed from the top.
Figure 4: Manual operation
Caution!
The handwheel should not be used in ongoing
motor operation, as the actuator tries to
compensate the deviation in position,
depending on the operating mode selected.
If a fail-safe unit type PSCP (option) is
installed,
the handwheel can’t be used, as the
actuator drives back to the failsafe position.
Summary of Contents for PS-AMS PSQ Series
Page 22: ...22 16 CE Declaration of Conformity...
Page 23: ...23...







































































