





























3 Product Description
14
Version: 2.3.0
MS207E
H-820 Hexapod Microrobot
INFORMATION
The dimensional drawing (p. 44) contains the following:
Orientation of the default coordinate system
Position of the default center of rotation
Example: Consecutive rotations
INFORMATION
For a clearer view, the figures have been adapted as follows:
Round platform replaced by T-shaped platform
Coordinate system shown shifted
Center of rotation in the top left corner of the platform
1.
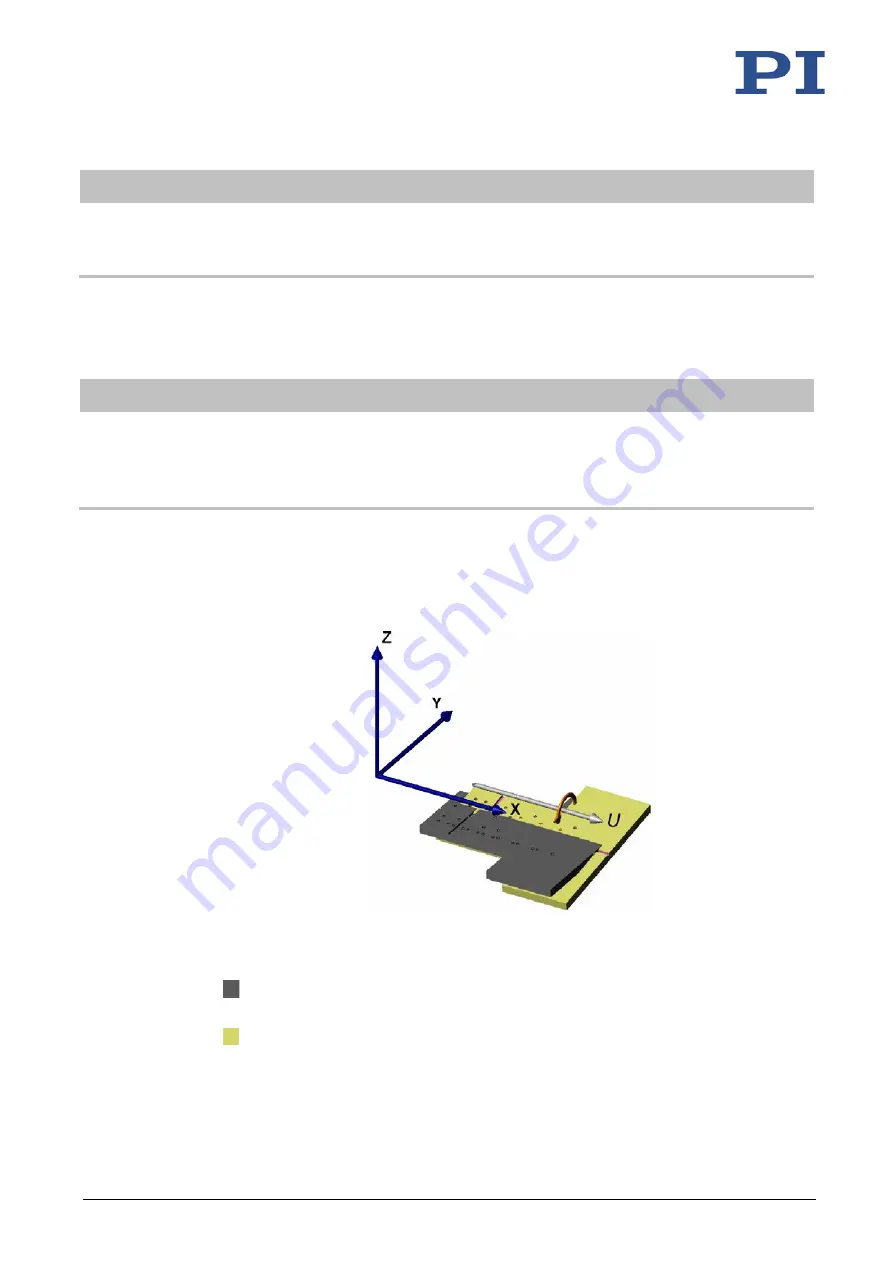
The U axis is commanded to move to position 10.
The rotation around the U axis tilts the rotational axes V and W.
Figure 3: Rotation around the U axis
Platform in reference position
Platform position: U = 10 (U parallel to spatially-fixed X axis)







































































