


























-
57
-
-
56
-
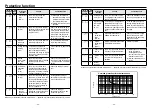
Detail of parameters
Signal Input and Signal Output Choosing Function
•
Signal input choosing function
Function can be assigned to signal input
I
1 to
I
4 by Pr50 to 53.
Function
number
Assignment
function
Description of function
0
Forced trip
When preset signal input is turned on, the Brushless amplifier
executes external forced trip
(E-0L).
When external forced trip is executed, in order to activate the Brush-
less amplifier again, reset trip and then input the run command.
1
Instantaneous
stop
When preset signal input is turned on, the Brushless ampli-
fier reduces speed and stops in deceleration time set by Pr59
“Deceleration time in instantaneous stop”. (Linear deceleration)
When the setting is “0”, the command is an instantaneous stop.
(However, the Brushless amplifier may operate for accumulated
pulses of command.)
Run command cannot be given to the Brushless amplifier with
stop signal turned on. Be sure to turn off stop signal in operation.
2
Deceleration
stop
When preset signal input is turned on, the Brushless amplifier
reduces speed and stops in deceleration time set at the start
of Brushless amplifier operation (deceleration time set on each
point in positioning operation, jog deceleration time in jog opera-
tion, and homing acceleration and deceleration time in homing).
(Linear deceleration)
Run command cannot be given to the Brushless amplifier with
deceleration stop signal turned on. Be sure to turn off decelera-
tion stop signal in operation.
3
Homing start
When this signal is turned on, homing operation is started.
4
Forward jog
The motor runs at jog speed in + direction as long as this signal is on.
5
Reverse jog
The motor runs at jog speed in – direction as long as this signal is on.
6
Point designation 1 Point designation 1
7
Point designation 2 Point designation 2
8
Run start
Motor is positioned at any point designated by point designation 1 and 2.
9
Sequential run start Motor is positioned at the following point every time the signal is input.
10
Trip reset
The trip is reset (trip cleared) when set signal input is turned on
approx 100 ms or longer.
When Pr58 is set at "1", trip can be reset by turning on opera-
tion start signal (run start, sequential run start, forward jog,
reverse jog, and homing start) for approx 1 second or longer. Be
sure to remove the cause before trip reset.
11
Home sensor
Make wiring so that the signal is turned on when home sensor
is detected.
12
Limit in + direction
Make wiring so that the signal turn on any time. If the input is
turned off, the motor does not run in + direction.
Limit function is disabled when this signal is not used.
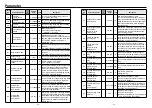
Function
number
Assignment
function
Description of function
13
Limit in – direction
Make wiring so that the signal turn on any time. If the input is
turned off, the motor does not run in - direction.
Limit function is disabled when this signal is not used.
14
Direction switching Direction of homing, jog, and positioning command is all
reversed while this signal is turned on.
15
Motor-free
When preset signal is turned on, the motor is free to rotate. If
the
motor-free signal is turned on during motor operation, the
load may keep moving through inertia and hit mechanical stops.
In addition, it is impossible to give run command to the motor
with motor-free signal turned on. Be sure to turn off the signal in
running. In switching the motor-free signal from on to off, input
the run start signal after 100ms or longer the motor-free signal
is turned off.
In the case where relative travel command is used for position-
ing operation, if positioning operation is executed after turning
on and then off the motor-free signal, positioning might shift. If
this is inconvenient to your application, set Pr49 to "1. homing
operation is required again when motor is free". Then, homing
operation is required again for executing positioning operation
when motor-free condition (or trip) is cleared.
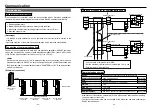
• When more than one signal input is assigned to the same function, the signal is made
effective when any one signal is input.
• Logic of signal input can be changed by setting the polarity change parameter (Pr54
to Pr57) (Set an input desired to be operated on disconnected side of wiring such as
0: Normal logic (Input is effective in connecting with GND), 1: Inverted logic (Input is
effective by OPEN), Inverted logic is forced trip (emergency stop input ).
• Parameters above (Pr50 to 57) are made effective after power is turned on again.
• Signal output selection function
Function can be assigned to signal output 01 and 02 by Pr5C and 5d.
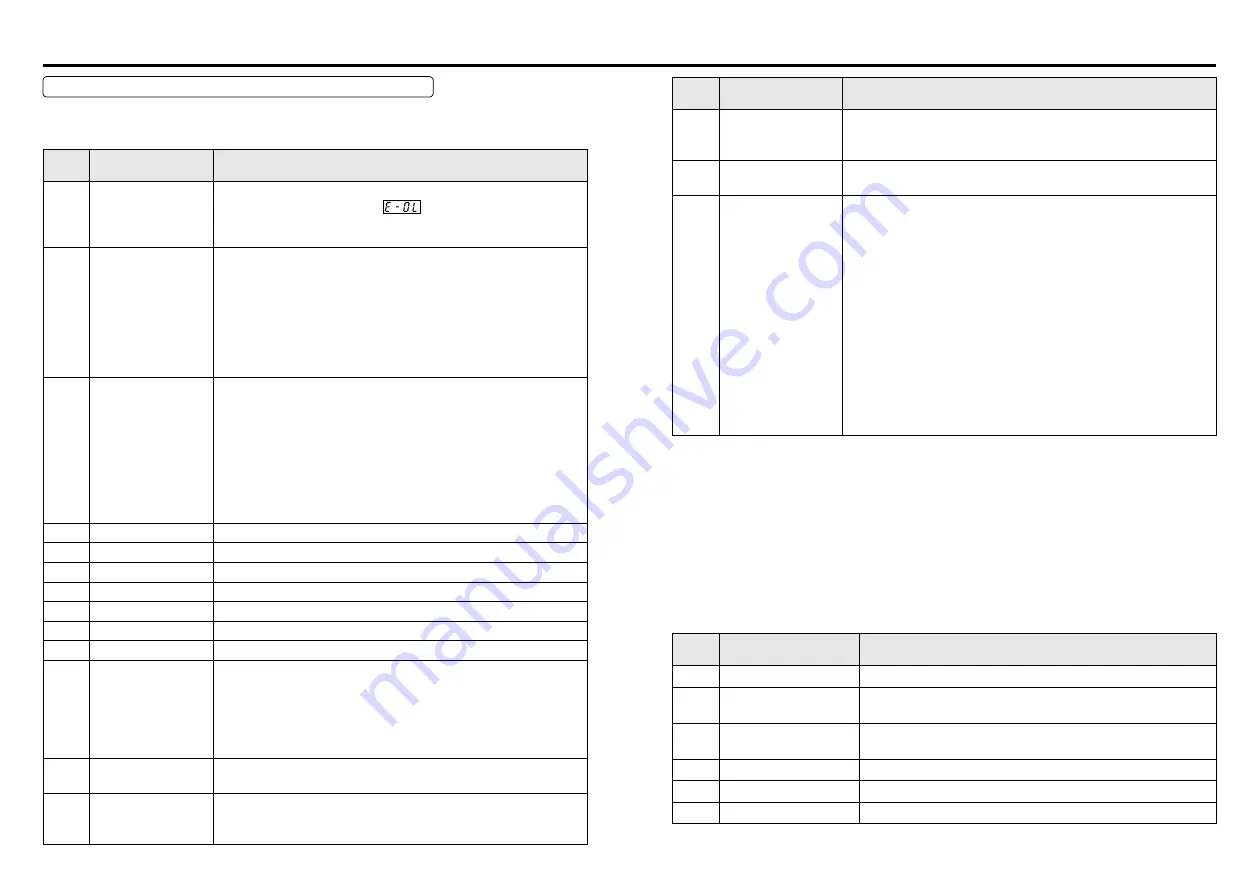
Function
number
Assignment
function
Description of function (standard logic)
0
Trip output
This signal is normally on, and turns off when tripping occurs.
1
In-position
This signal turns on when motion command is completed as
well as position error is within Pr38.
2
In-motion (BUSY)
This signal turns on during run command.
(Run start signal is not accepted as long as this signal is on.)
3
Homing completion
This signal turns on when homing operation is completed.
4
Overload detection
This signal turns on when torque above 100% is output.
5
Torque under restriction This signal turns on as long as torque is restricted.
• Logic of signal output can be inverted by polarity choosing parameter (Pr5E and 5F).







































































