31
6.
Description of the Sample Programs
This chapter describes design examples of robot programs to construct applications
using a sample program.
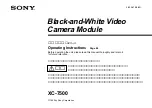
You can understand how to implement a robot program to control the Vision Sensor
as shown in the following figure.
The sample program is implemented with the following procedures.
When building
an actual application, design, implement and test the robot program, utilizing the
functions described in Chapter 7.
Connecting the Vision Sensor to the robot controller
▼
Switching scenes on the Vision Sensor
▼
Moving the Robot to the Image Position
▼
Register the Current Robot Position in the Vision Sensor
▼
Executing Measurements on the Vision Sensor
▼
Getting the Measurement Results
▼
Moving the Robot to the Robot Approach Position at Measurement
▼
Moving the Robot to the Robot Command position at Measurement
▼
Disconnecting the Vision Sensor from the Robot Controller
Robot
Robot controller
Vision Sensor
3) Command execution
(Driving the robot etc.)
2) Command response
(Measurement value etc.)
1) Control command
(Measurement etc.)
Sample
Program
Execution
Switching hub
PC