
























2
Contr
oller sta
tus transitions
6
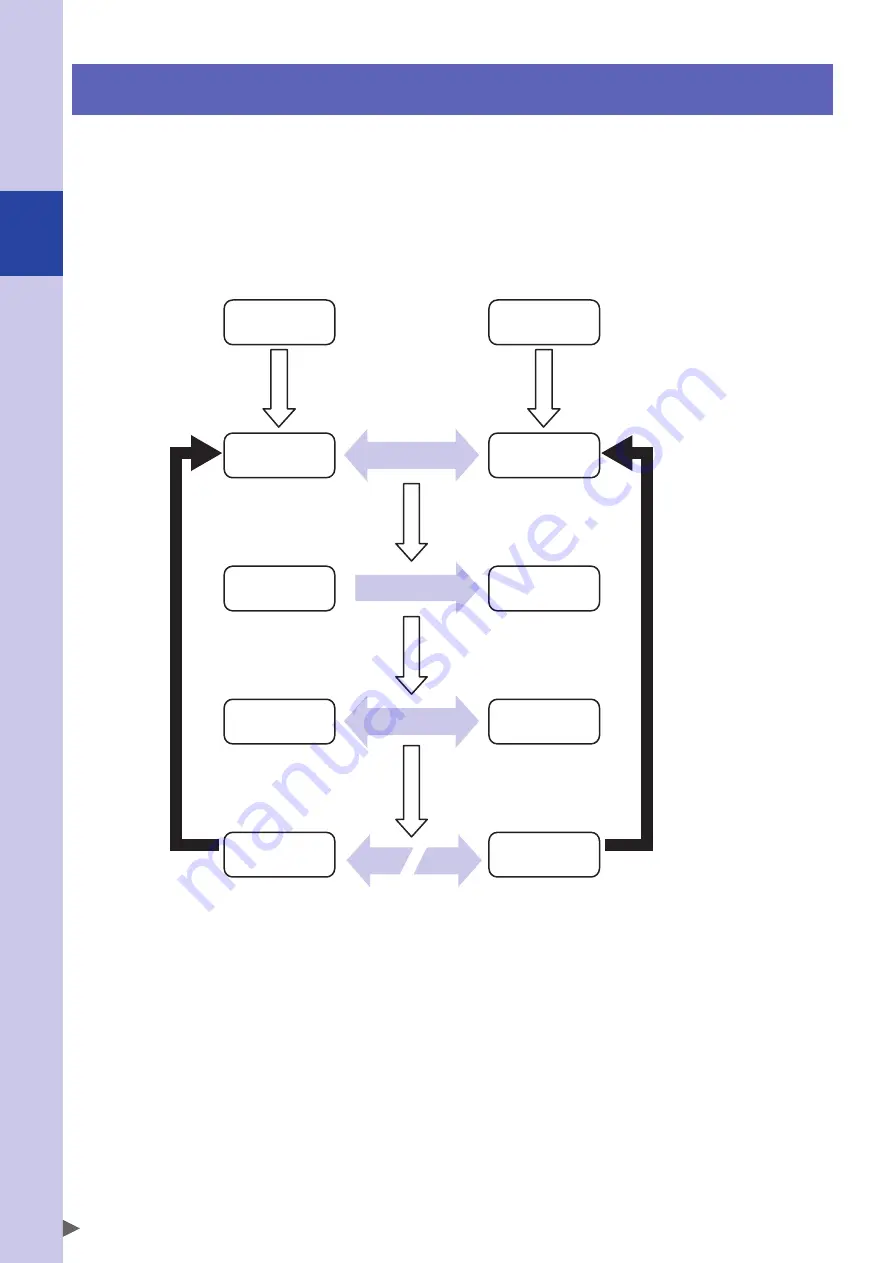
2. Controller status transitions
Here we explain the status transitions of a robot controller equipped with a network interface unit. A
controller equipped with a network interface unit will initially start up in the emergency stop state. In order
for robot operation to be possible, communication must be established with the host control device, and a
sign that cancels the emergency stop state must be input.
If communication with the host control device is interrupted for any reason, the controller will again transition
to the emergency stop state regardless of the I/O status. In order to resume operation, I/O processing is
required, such as reestablishing communication, cancelling the emergency stop state, and resetting any error.
Power on, controller starts
in emergency stop state
When communication
ceases, the robot transitions
to the emergency stop state,
robot power is shut down,
and the program also stops.
The robot is controlled via
remote commands or
programs
Signals are input to cancel
emergency stop or errors,
putting the robot in an
operable state.
After both the host control
device and the controller
have started up and
established communication,
cyclic communication begins.
Host control device
Host control device
Host control device
Host control device
Robot controller
Robot controller
Robot controller
Robot controller
Robot controller
Host control device
Cease communication
Exchange I/O information
Input signals
Establish communication
Startup
Startup
Summary of Contents for SCARA Robots YRCX Series
Page 1: ... 7 6HULHV DW 1R 1 352 1 7 86 5 6 0 18 6 5 5RERWV 5 6HULHV ...
Page 2: ......
Page 41: ......
Page 43: ......
Page 44: ... DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH ...





















































