





























76
Cobra 350 User's Guide
05624-000 Rev. K
5.12 Installing User-Supplied Safety Equipment
DC
IN
24V
GND
AC
200 -
240V
Ø
1
XBEL
TIO
XIO
Servo
ENET
ENET
XSYSTEM
1
2
3
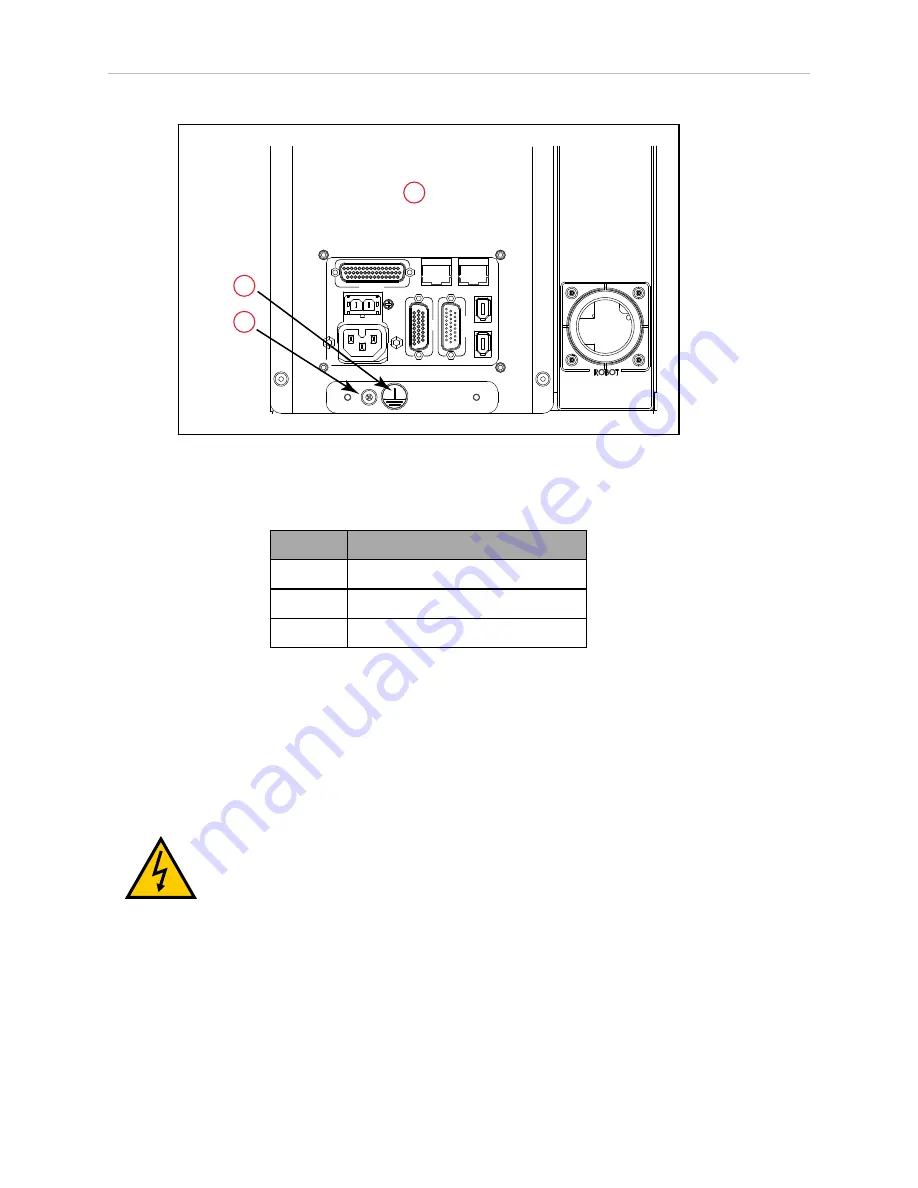
Figure 5-15. Earth Ground Location
Table 5-16. Earth Ground Location Description
Item
Description
1
Robot Interface Panel
2
Ground Label
3
Ground Screw
Robot-Mounted Equipment Grounding
The Cobra 350 Joint 3 quill and tool flange are not reliably grounded to the robot base. If haz-
ardous voltages are present at any user-supplied robot-mounted tooling, you must install a
ground connection from that tooling to the ground point on the robot base. Hazardous
voltages can be considered anything in excess of 30 VAC (42.4 VAC peak) or 60 VDC.
Also, see Tool Flange Dimensions for Cobra 350 Robots (Units in mm) on page 122 for the
grounding point on the tool flange.
WARNING:
ELECTROCUTION RISK
Failing to ground robot-mounted equipment or tooling that uses hazardous
voltages could lead to injury or death of a person touching the end-effector
when an electrical fault condition exists.
5.12 Installing User-Supplied Safety Equipment
The user is responsible for installing safety barriers to protect personnel from coming in con-
tact with the robot unintentionally. Depending on the design of the workcell, safety gates, light
curtains, and emergency stop devices can be used to create a safe environment. Read the
Robot
Safety Guide
for a discussion of safety issues.







































































