5 Usage guidance (Detection)
5.1 Analog output model
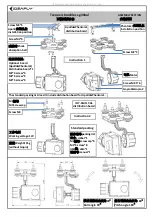
10mm
70mV
40mm
Black
paper
85mm
30mV
Reference value
White
paper
Reference value
B5W-LB Light convergent reflective type sensor User’s manual (E592)
Analog and digital output models are lined up in the miniature type B5W-LB series. Both models have the
same optical characteristics. In order to provide a better understanding of B5W-LB series, the analog output
model will be explained first.
The table “Electrical and Optical Characteristics” mentioned in the data sheet of B5W-LB2101 is shown below.
The sensor can be used in any application which requires detection of a wide variety of objects. However, within the
table, only white and black papers are used to specify the sensing distance characteristics. (See explanation,
below).
The sensing capability of a sensor can be verified with the
graph “Receiver output vs. Sensing distance characteristics”.
The graph of B5W-LB2101 is shown below.
The sensing distance with black paper can be read as
follows;
-Sensing distance (Black paper):
The output voltage should be 70 mV or more in the distance
range of 10 to 40 mm.
The non-sensing distance with white paper is read
as follows;
-Non-sensing distance (White paper):
The output voltage should be 30 mV or less in the distance
range of 85 mm or more.
When designing your actual application, the sensing distance should be properly determined by first referencing
the graph of “Receiver output vs. Sensing distance.” In the case that the sensing object position does not
fluctuate, the sensing distance is recommended to be set at the peak of the graph’s curve.
As previously stated, commercially available white and black papers are used to specify the characteristics
values in the product specification sheet. However the sensed objects are typically not black or white papers in
actual applications. Therefore it is necessary to measure “Output voltage-sensing distance” with the actual
objects to be sensed. It is essential to set a proper threshold level according to the evaluation test data obtained
for the considerable worst case conditions, in order to achieve long term stable sensing in your applications.
Additionally, it is ideal to test as many samples as possible to consider individual differences of sensors. The
recommended minimum threshold is 40 mV, but this depends on the actual environmental noise situation.
Receiver output vs. Sensing distance
3