




















36 System
Components
Logic Unit keeps the FSM’s on Internal Control and flags an error to the
operator.
The external feedback signals should be scaled so that
±
10V yields
±
26 mrad
of mechanical rotation. Care needs to be taken to align the external sensors so
that
X
and
Y
rotation axes of the FSM correspond to the correct
X
and
Y
outputs of the quad / lateral effect cell amplifier.
Reference position voltages can be applied to the Command Inputs so that if
the INT/EXT selector switch voltage input returns to Internal Control mode,
the FSM will move to a defined position. Otherwise the mirror will return to
the powered-on null position.
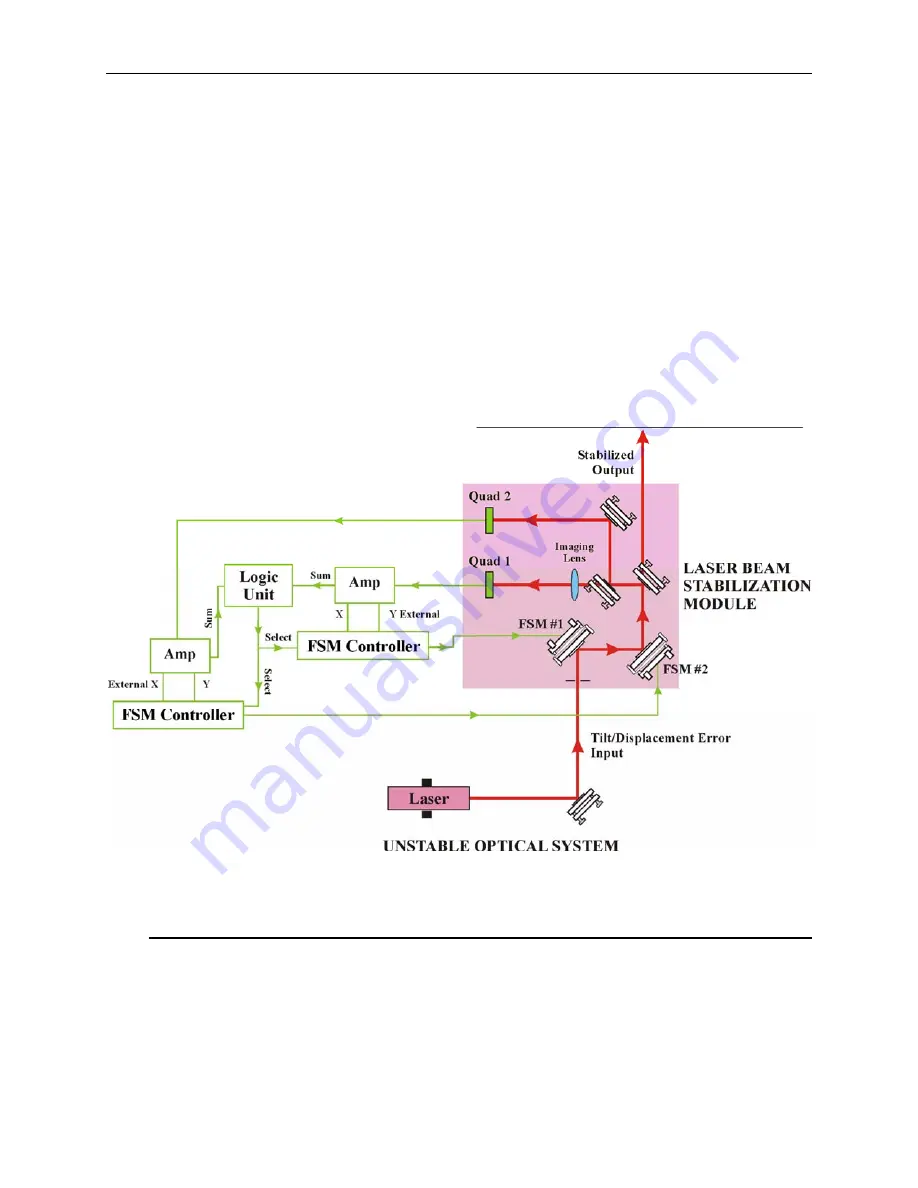
See Application Notes 2 and 23 for additional information on active beam
stabilization.
Figure 18: FSM configured with external feedback sensor for laser beam stabilization.
6.7
Open Loop Control Mode
The Model FSM-CD300B controller/driver can be used in Open Loop mode,
which does not make use of External or Internal feedback signals. The Open
Loop mode is selected by applying a high TTL-level signal X_OL_SW
selector switch for X (Pin 9) and/or Y_OL_SW selector switch for Y (Pin
10). The Open Loop command signals are applied to the X_OL_CMD input
Summary of Contents for FSM-300
Page 1: ...FSM 300 Fast Steering Mirror FSM CD300B Controller Driver User s Manual...
Page 2: ......
Page 3: ...EU Declaration of Conformity 3...
Page 4: ......
Page 9: ...9...
Page 10: ......
Page 26: ...26 System Components Figure 9 Detailed Drawing of FSM 300 Mirror Head Housing...







































































