






















2
2
2
1
26
Subject to modifications
•
19, rue de Rennes
•
BP 83221 • F - 35690 ACIGNÉ
15. AUTO-LEVEL SYSTEM
With the AUTO-LEVEL system, the implement can be returned
to its preset position automatically (only available with e-Pilot).
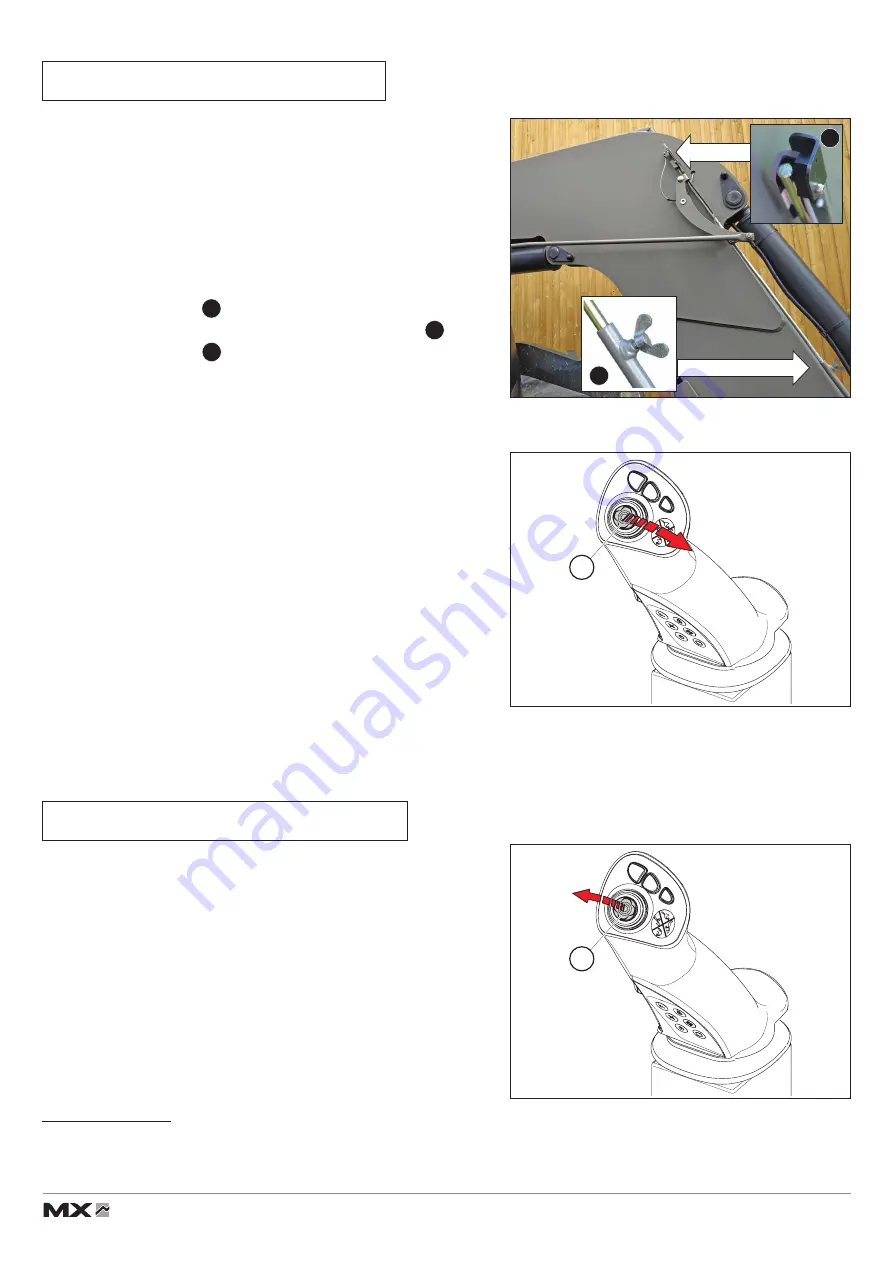
15.1 Tool position adjustment
The tool position is adjusted at the indicator rod control.
See figures opposite.
—
Put the implement into the desired position.
—
Lower the implement to the ground.
— Loosen the wingnut
1
.
—
Position the end of the control rod in front of the sensor
2
.
— Tighten the wingnut
1
.
15.2 Tool automatic position reset
The system operates in both directions: crowding and dumping.
If the implement is dumped upon activating the AUTO-LEVEL
system, the loader crowds. If the implement is crowded,
the loader dumps.
Control: Direct Control Joystick (2) backwards.
16. AUTO-UNLOAD SYSTEM
The bucket/grab synchronisation operates in both directions:
—
opening the grab and tipping the bucket.
—
Crowding the bucket and closing the grab.
The AUTO-UNLOAD system only operates if the loader is fitted
with a 3rd
function.
16.1 Controlling the AUTO-UNLOAD system
Automatic emptying (bucket/grab synchronisation).
Control: Direct Control Joystick (2) forwards.
Recommendations:
—
To optimise operation of the AUTO-UNLOAD system,
we suggest activating the system when the implement
is in the horizontal position while dumping in a trailer.