





























Motherboard Design Guide
Requirements for Components of Third-party Suppliers
maxon motor control
4-74
Document ID: rel5977
EPOS4 Positioning Controller
Edition: February 2016
EPOS4 Module/Compact 50/8 Hardware Reference
© 2016 maxon motor. Subject to change without prior notice.
I
NPUT
F
USE
(FU1)
An input fuse (FU1) is necessary in order to provide reverse polarity protection. Together with an unipo-
lar TVS diode (D1), this prevents current from flowing in the wrong direction.
TVS D
IODE
(D1)
To protect against overvoltage resulting from voltage transients or brake energy feedback, we recom-
mend connecting a TVS (transient voltage suppressor) diode (D1) to the voltage supply line.
C
APACITOR
(C1)
The function of the Module does not necessarily require the use of an external capacitor. Nevertheless,
to further reduce voltage ripple and feedback currents, an electrolytic capacitor (C1) can be connected
to the voltage supply line. Use of an electrolytic capacitor is also recommended to avoid oscillations
caused by supply cable inductance or Module’s built-in capacitors that could lead to a voltage overshoot
at power plug-in.
4.1.3
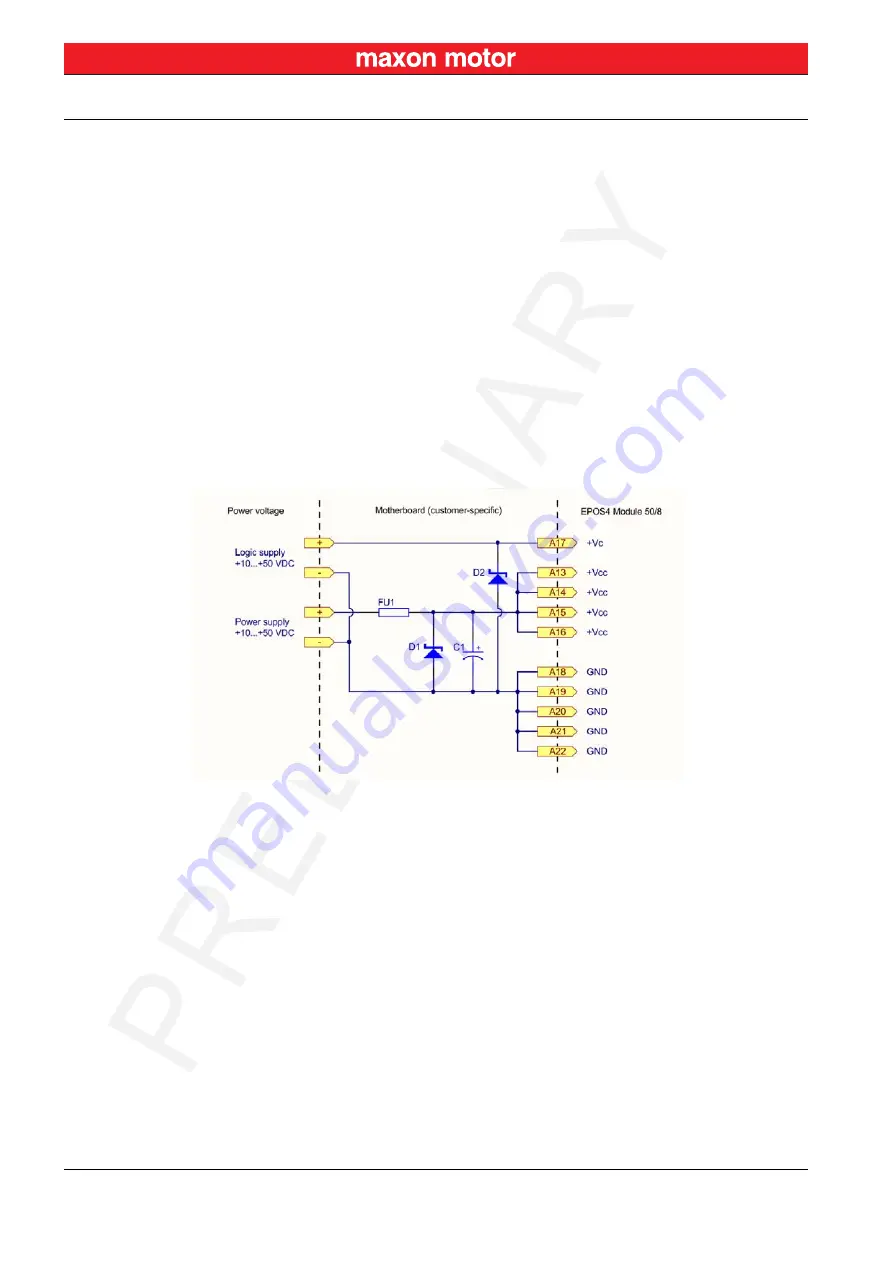
Logic Supply Voltage
The Module features a logic supply voltage input. Its voltage range is 10…50 V and must be either
sourced separately or by the power supply voltage.
Figure 4-51
Wiring of logic supply
If the logic supply voltage is sourced separately, a transient voltage suppressor diode (D2) at the logic
supply voltage input can be connected to protect the module against overvoltage.
4.1.4
Motor Cables and Motor Chokes
The Module is not equipped with internal motor chokes.
The majority of motors and applications do not require additional chokes. However, in case of high sup-
ply voltage with very low terminal inductance, the ripple of the motor current can reach an unacceptably
high value. This causes the motor to heat up unnecessarily and causes instable control behavior. The
minimum terminal inductance required per phase can be calculated using the following formula:
L
Phase
1
2
---
V
CC
6
f
PWM
I
N
⋅
⋅
-----------------------------
0.3
L
Motor
⋅
(
)
–
⋅
≥







































































