





























Learning Basic Features
88
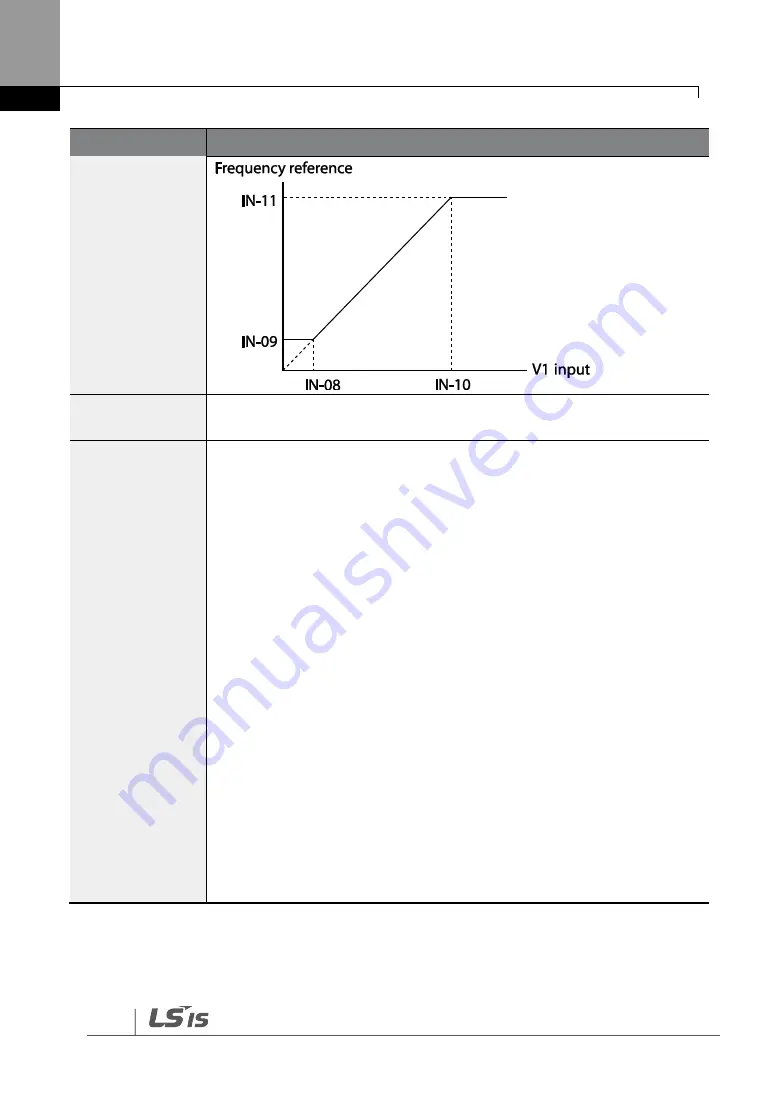
Code
Description
IN-16 V1 Inverting
Inverts the direction of rotation. Set this code to ‗1 (Yes)‘ if you need the
motor to run in the opposite direction from the current rotation.
IN-17 V1
Quantizing
Quantizing may be used when the noise level is high in the analog input
(V1 terminal) signal.
Quantizing is useful when you are operating a noise-sensitive system,
because it suppresses any signal noise. However, quantizing will diminish
system sensitivity (resultant power of the output frequency will decrease
based on the analog input).
You can also turn on the low-pass filter using code IN-07 to reduce the
noise, but increasing the value will reduce responsiveness and may cause
pulsations (ripples) in the output frequency.
Parameter values for quantizing refer to a percentage based on the
maximum input. Therefore, if the value is set to 1% of the analog
maximum input (60 Hz), the output frequency will increase or decrease by
0.6 Hz per 0.1 V difference.
When the analog input is increased, an increase to the input equal to 75%
of the set value will change the output frequency, and then the frequency
will increase according to the set value. Likewise, when the analog input
decreases, a decrease in the input equal to 75% of the set value will make
an initial change to the output frequency.
As a result, the output frequency will be different at acceleration and
deceleration, mitigating the effect of analog input changes over the output
frequency.
(ripple)
Summary of Contents for H100
Page 14: ......
Page 18: ...Preparing the Installation 4 37 90 kW 3 Phase ...
Page 27: ...Preparing the Installation 13 ...
Page 47: ...33 Installing the Inverter ...
Page 48: ...Installing the Inverter 34 Input and Output Control Terminal Block Wiring Diagram ...
Page 61: ...47 Installing the Inverter ...
Page 71: ...Learning to Perform Basic Operations 57 ...
Page 88: ...Learning to Perform Basic Operations 74 ...
Page 103: ...89 Learning Basic Features Code Description V1 Quantizing ...
Page 129: ...115 Learning Basic Features ...
Page 140: ...Learning Basic Features 126 ...
Page 148: ...Learning Basic Features 134 ...
Page 171: ...157 Learning Advanced Features Deceleration dwell operation ...
Page 183: ...169 Learning Advanced Features ...
Page 184: ...Learning Advanced Features 170 PID Command Block ...
Page 185: ...171 Learning Advanced Features PID Feedback Block ...
Page 186: ...Learning Advanced Features 172 PID Output Block ...
Page 187: ...173 Learning Advanced Features PID Output Mode Block ...
Page 197: ...183 Learning Advanced Features ...
Page 201: ...187 Learning Advanced Features Code Description 100 EPID1 Control block ...
Page 202: ...Learning Advanced Features 188 EPID2 Control block ...
Page 237: ...223 Learning Advanced Features Time Period Schedule AP3 38 Except3 Day 01 01 ...
Page 244: ...Learning Advanced Features 230 ...
Page 259: ...245 Learning Advanced Features Code Description Code Description Volt ...
Page 362: ...Learning Protection Features 348 ...
Page 415: ...401 RS 485 Communication Features Item Standards Parity check None ...
Page 524: ...Table of Functions 510 ...
Page 533: ...Table of Functions 519 ...
Page 547: ...533 Troubleshooting ...
Page 585: ...Technical Specification 571 ...
Page 594: ...580 ...
Page 595: ...581 ...
Page 596: ...582 ...







































































