





























58 / 109
Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
9. Select the calibration plane.
10. Optionally: Enter the exposure time or set it using the plus/minus keys or
the slider control.
11. Press
Save
. The settings are saved.
Configuration of the task has been successfully completed when the icon
in the
Status
column changes to green.
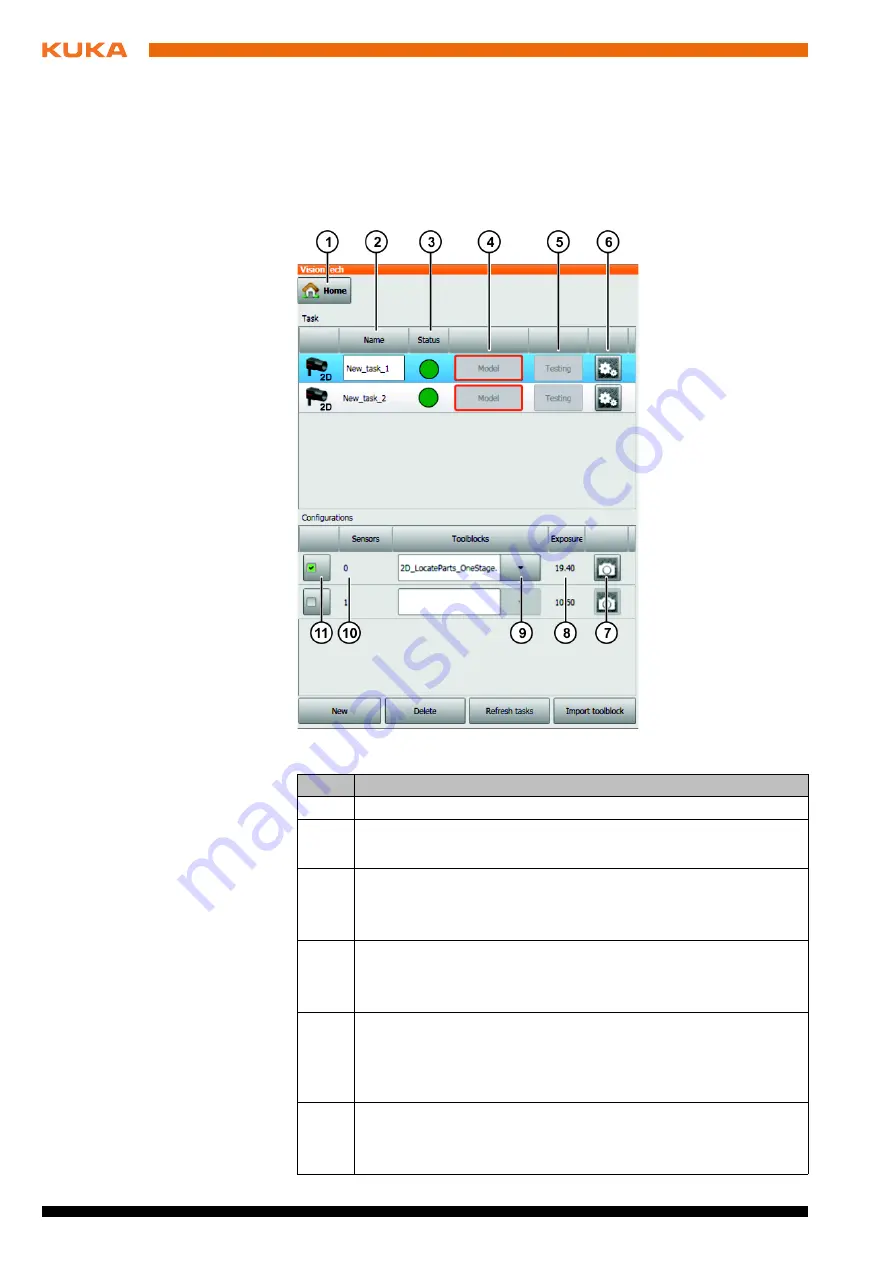
Description
Fig. 10-3: Configuring a 2D task
Item
Description
1
Back to Overview
2
Name of the task
The name is freely selectable.
3
State of the task
Green:
Task has been successfully configured.
Red:
Task is not configured.
4
Generate model.
Green frame:
Model has been successfully generated.
Red frame:
No model has yet been generated.
5
Test task
Activated:
The task can be tested.
Deactivated:
The task cannot be tested. No model has yet
been generated, or the task is not configured.
6
Settings icon
Select the number of parts
Take images from all cameras
Summary of Contents for VisionTech 2.1
Page 6: ...6 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 10: ...10 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 18: ...18 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 26: ...26 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 28: ...28 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 32: ...32 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 36: ...36 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 50: ...50 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 78: ...78 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 82: ...82 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 90: ...90 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 92: ...92 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 94: ...94 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 96: ...96 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 98: ...98 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 106: ...106 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 109: ...109 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...