





























30 / 109
Issued: 11.10.2013 Version: KST VisionTech 2.1 V1
For detailed specifications of the connecting cables, see (
>>>
scription of the connecting cables" Page 40).
Interface X64
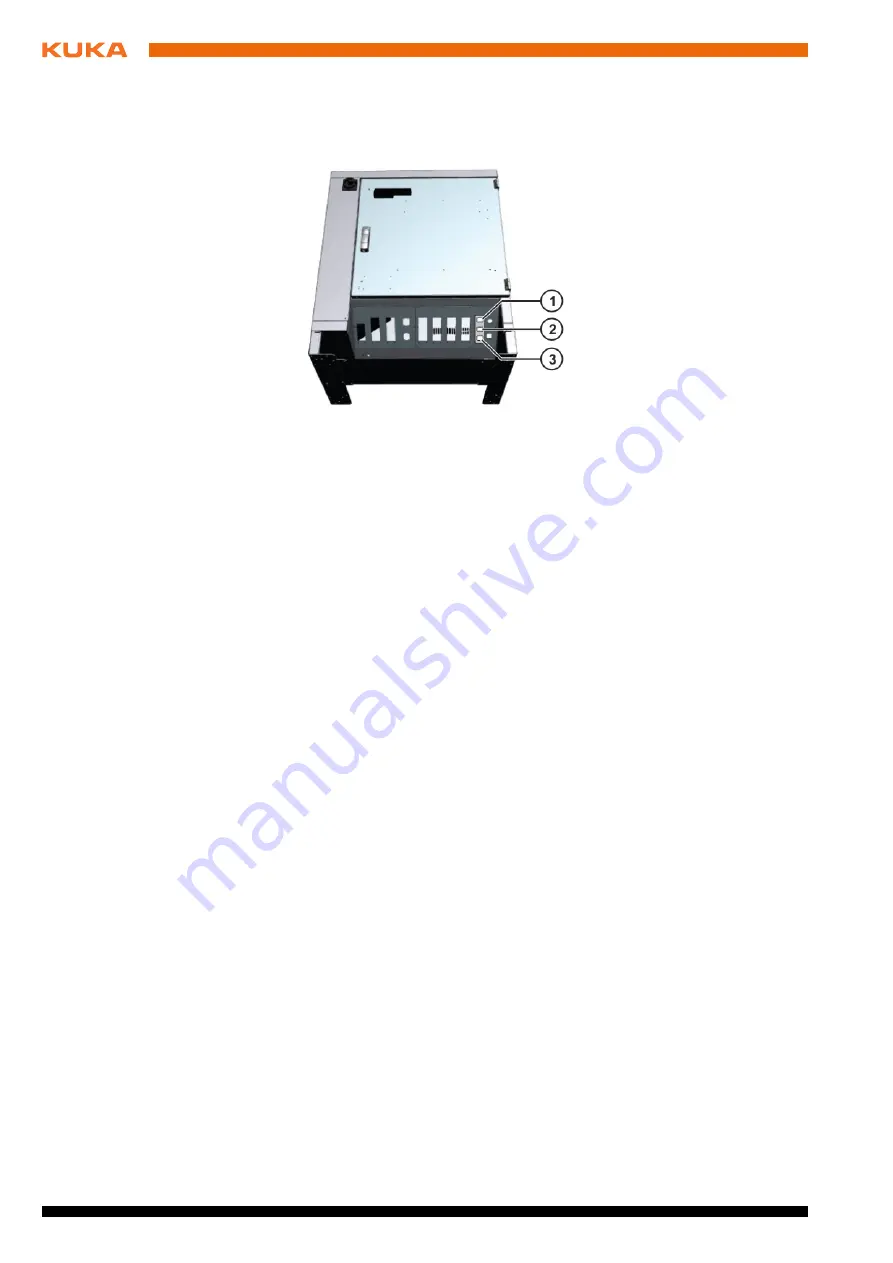
Interfaces X64.1 to X64.3 are situated on the connection panel of the KR C4.
Fig. 6-1: Interfaces X64.1 to X64.3
1
Connection X64.1
3
Connection X64.3
2
Connection X64.2
Summary of Contents for VisionTech 2.1
Page 6: ...6 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 10: ...10 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 18: ...18 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 26: ...26 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 28: ...28 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 32: ...32 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 36: ...36 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 50: ...50 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 78: ...78 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 82: ...82 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 90: ...90 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 92: ...92 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 94: ...94 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 96: ...96 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 98: ...98 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 106: ...106 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...
Page 109: ...109 109 Issued 11 10 2013 Version KST VisionTech 2 1 V1 KUKA VisionTech 2 1 ...







































































