







User´s manual: Intelligent switch ENLINK 2RS Plus
-2-
one of the receivers to a 4xNiCd battery and the other to a 5xNiCd. The servo itself or the stabilization
unit is then supplied with power from the receiver which has the higher supply voltage. In this
example the servo is first supplied power from the 5xNiCd until the voltage of both batteries is equal.
Nevertheless, we recommend using the same two sets of batteries.
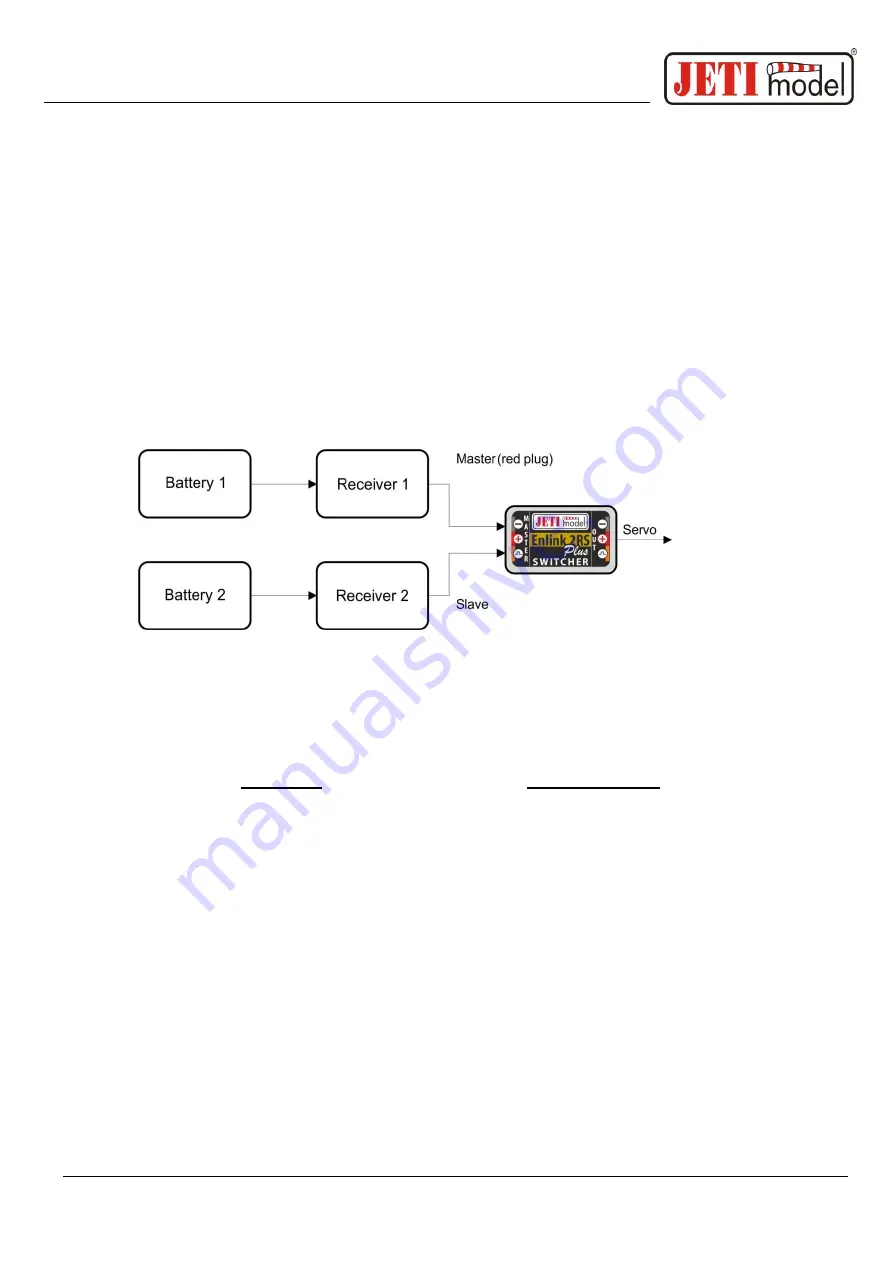
On the Master input (main receiver, red connector) the output from the main receiver is connected,
the output from the “back-up” receiver is connected to the Slave input (back-up receiver, black
connector).
ENLINK 2RS Plus has two outputs for connecting two JR style connectors. The connection of both
outputs is
parallel
. Thus, it is possible to connect e.g. two separate servos with the same function on
the output.
3.
Version with Servo Output Firmware
ENLINK 2RS Plus eliminates signal losses from individual receivers. In case of a total loss of both
input signals, the ENLINK 2RS Plus switches to a preset mode.
For the correct function of the ENLINK 2RS Plus device it is necessary to have the receiver
being connected to MASTER labelled input set so that it does not generate any signal on its servo
outputs in case of signal loss (e.g. repeating the last known value or activating Fail Safe of the
receiver). If Fail Safe is required, it should only be set in the receiver connected to the ENLINK
input labeled SLAVE or directly in the ENLIK setup.
The selected channel must be identical for both receivers set and have the same function for both
receivers. It is advisable to use a system with digital data transfer (Duplex) as the main receiver.
When connecting the ENLINK 2RS Plus to two separate receivers, the correctness of the signal starts
to be continuously evaluated on both outputs of the receivers. If there is a valid signal on the Master´s
input, the ENLINK 2RS Plus prefers validity of this servo position and generates this signal unchanged
to the servo output. In case an incorrect signal on the Master´s input is detected, the ENLINK 2RS Plus
starts generating a signal from the Slave input to the servo output if this signal is valid. Otherwise, the
ENLINK 2RS Plus goes back to the default state (it turns off output servo impulses, repeats last valid
position or switches to Fail Safe).





















































