





























P. 45
4. Application (Practice)
4-6 Speed Change Movement During Transfer
Movement Example: During movement, speed decreases towards given location. Assign Position 1 at 150mm away from
home, and Position 2 at 200mm away from home. The location will be near the home away from the initial position. Assign
Position 2 as the carry-over position, and move to Position 1 at a speed of 200mm/sec and from Position 1 to 2 move
100mm/sec.
Method: In this case, motion is executed consecutively, first with Position 1, then followed by Position 2. However,
before stopping at Position 1, it is necessary to first execute Select Input Start Signal Input after setting the Command
Position.To achieve this, set the Pos band for Position 1 and right after Position 1 is complete, input the Start Signal for
Position 2 (Command Position inputs should be set during movement to Position 1).
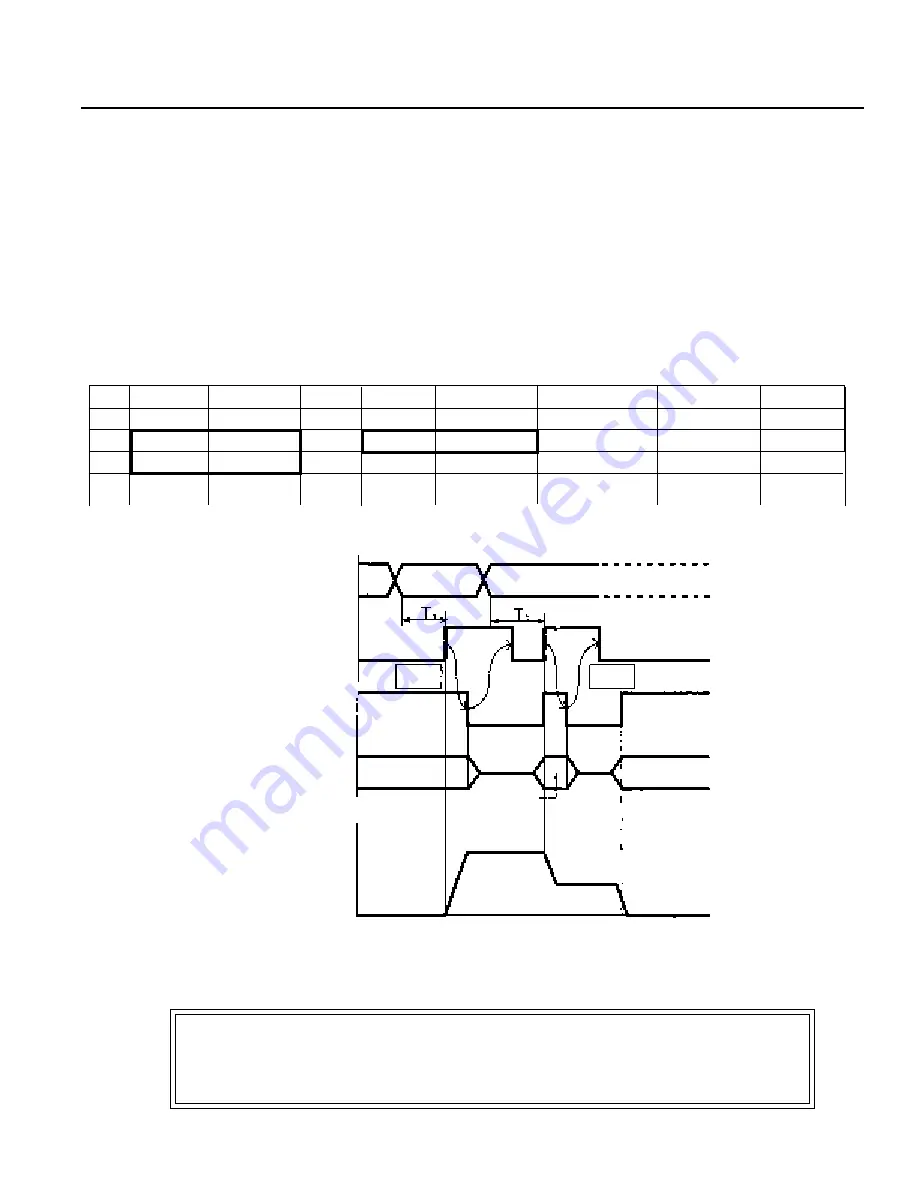
Position Data Table (Columns with thick lines indicate input insert)
T1: Over 5msec
Time from Command Position Select Input to Start Signal ON
Caution:
Once the Start Signal turns ON, the Positioning Complete Output will turn OFF.
Please execute Start Signal OFF only after confirming that the Positioning Complete Output turns OFF.
Command Position
Caution
Caution
Start
Positioning Complete
Complete Position
Speed
Actuator Transfer
Position 1
Position 1
Position 2
No.
0
1
2
Position (mm)
*
150
200
. . .
Push (%)
*
0
0
Pos. Band (mm)
*
1
0.1
Max ACC Flag (0/1)
*
0
0
ABS/INC (0/1)
Comments
Acc (G)
*
0.3
0.3
Speed (mm)
*
200
100