





























Document # 31-0008
LM2_Manual_1.4.doc
22
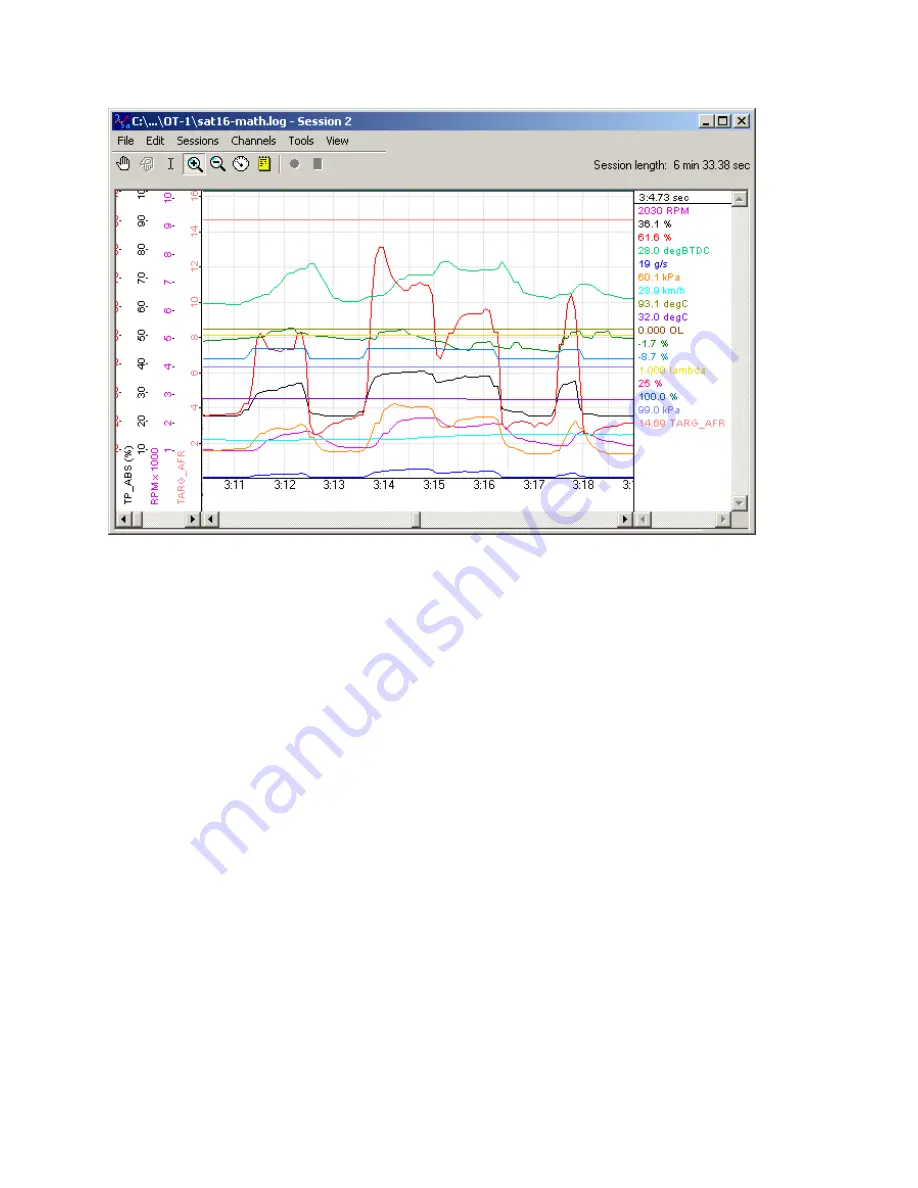
Even if we zoom in to a closer time scale, the data is quite smooth. Performance is
controlled by two things:
•
The Connection Speed
•
ECU
Responsiveness
The Lexus in the first example is using ISO 9141 and 10.4K bits per second. The
Saturn is using ISO 15765 (CAN) at 500K bits per second. So it is easy to understand
the difference in performance.
However, the responsiveness of the ECU also can be a significant factor. Consider this
log from a 2006 Pontiac GTO:







































































