








UK
6
7
5 Electrical connection
The inclination sensor is connected via a 5-pin M12 connector�
4
2
1
3
5
1: CAN_GND Ground
2: CAN_V+ supply voltage 24 V DC (+UB)
3: GND CAN_ supply voltage 0 V DC (+U
B
)
4: CAN_H High bus cable
5: CAN_L Low bus cable
5.1 Bus termination
One terminating resistor is required
●
if the sensor is connected at the end or the beginning of the bus�
● in case of a transmission rate ≥ 50 kBaud.
This prevents that information will be transmitted back to the CAN bus�
Dynamic ifm sensors have an integrated (switchable) 120 Ω termination resistor
that can be activated (1) or deactivated (0)�
The bus wires can be routed in parallel or twisted, with or without shielding in
accordance with the electromagnetic compatibility requirements� A single line
structure minimises reflection�
The following diagram shows the components for the physical layer of a two-wire
CAN bus�
PLC
CANopen
master
120 Ω
120 Ω
Inclinometer
Inclinometer
other CAN
CAN high wire
CAN low wire
6 Measurement axes
6.1 Dual axis inclination sensor ± 90° (JD23xx)
The X-axis (Roll) and the Y-axis (Pitch) measure the angular position relative to the
earth vector� Both axes are limited to ± 90°� The sensor is mounted horizontally�
The X-axis and the Y-axis provide 0° if the inclination sensor is installed in a
horizontal position�
-X
+X
-Y
+Y
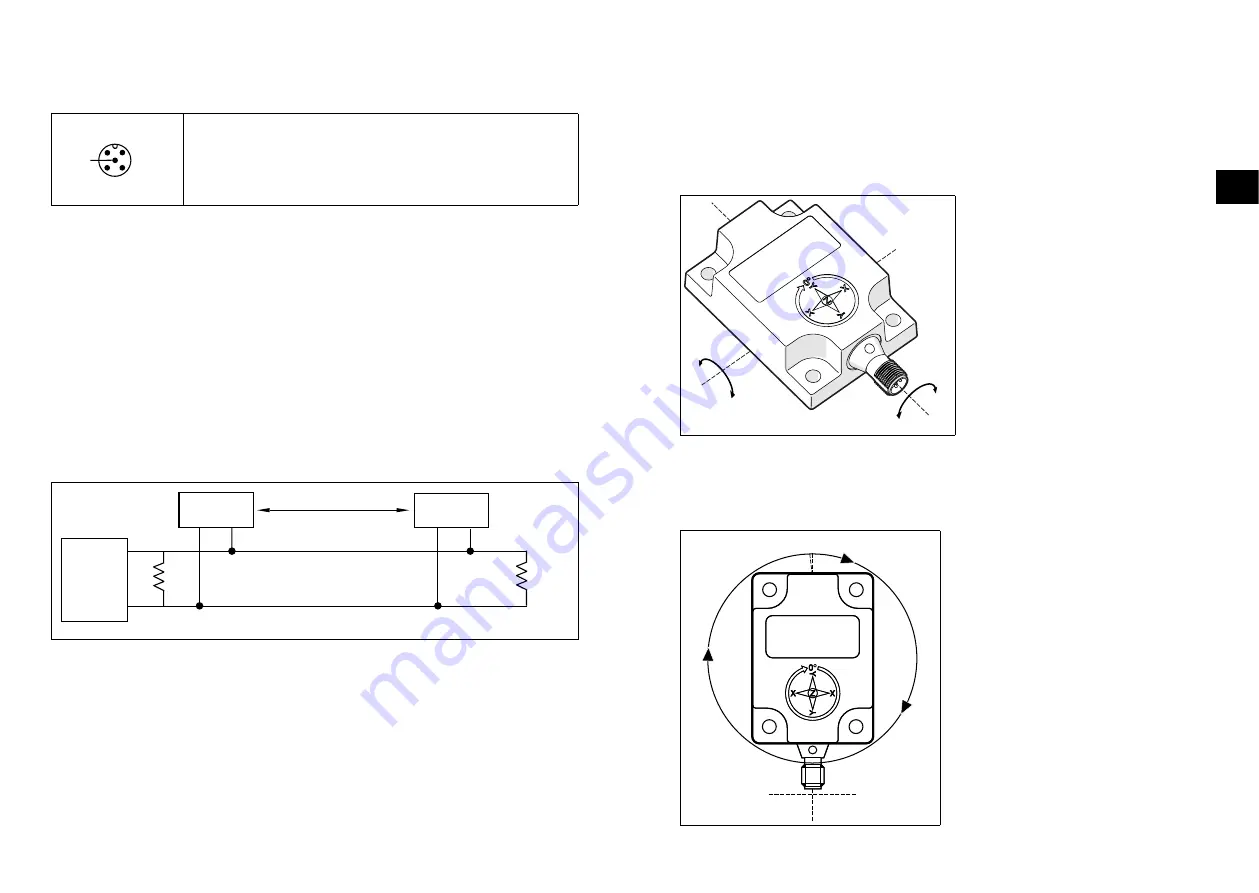
6.2 Single axis inclination sensor 0...360° (JD13xx)
The sensor is mounted vertically� A clockwise rotation around the Z-axis of the
sensor increases the angle value from 0���360°� When the male connector is
pointing downwards, the output is 0°�
Z = 0°
Z = 359,9°/