
























17
APOLLO A1
QUADCOPTER OPERATOR’S MANUAL
Moves Forward
Moves Backward
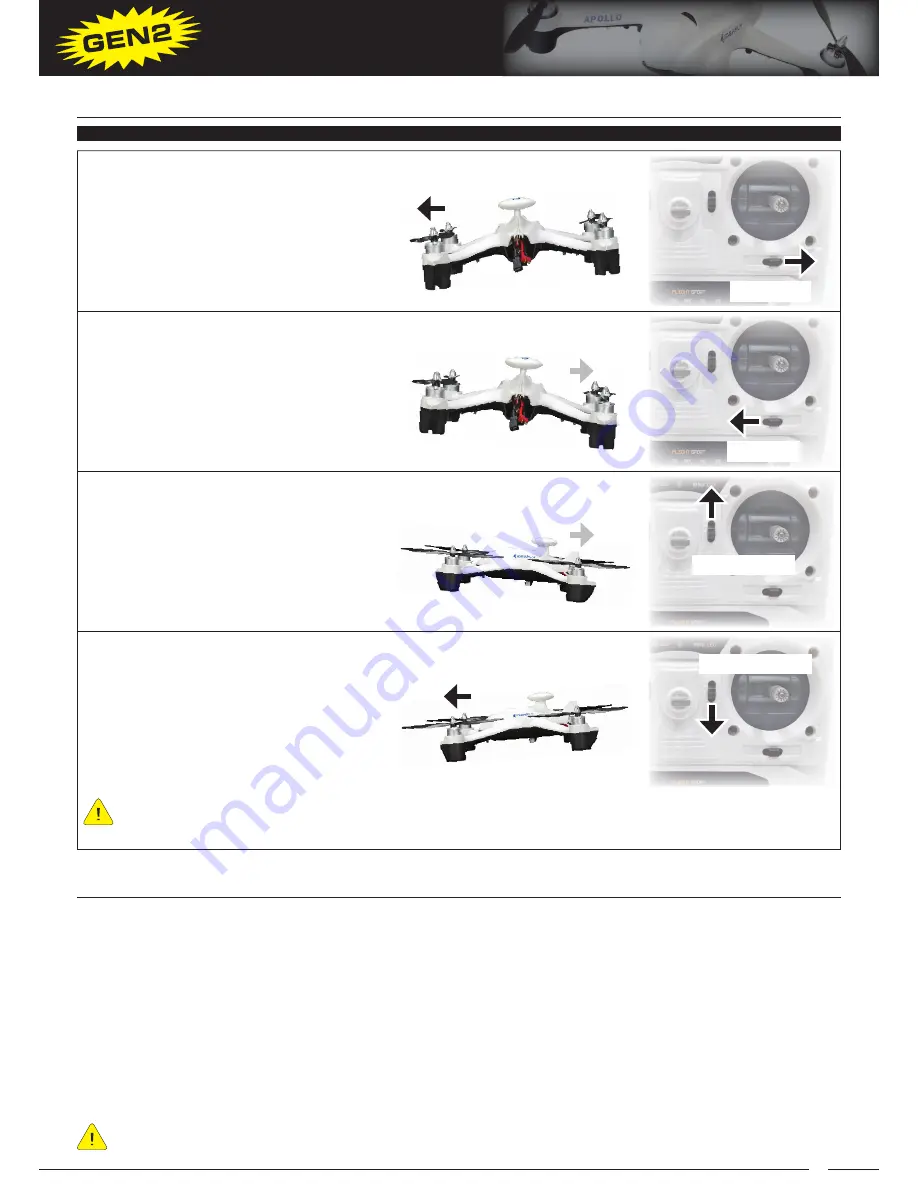
fLigHT TRiMMiNg THE QUADCOPTER, CONTiNUED....
If the quadcopter moves left, push the Roll Trim
Switch RIGHT several times until the quadcopter
stops moving left.
Push Right
If the quadcopter moves right, push the Roll
Trim Switch LEFT several times until the
quadcopter stops moving right.
Push Left
The Throttle Trim Switch should be left centered at all times. In addition, if for any reason the motors will not
arm after you’ve adjusted the trim switches, center the trim switches on the transmitter. In some cases, if too
much trim is used, it can cause the quadcopter’s safety features to not allow the motors to be armed.
fLyiNg THE APOLLO A1 QUADCOPTER
Moves Right
Moves Left
Push Forward
Push Backward
If the quadcopter moves backward, push the
Pitch Trim Switch FORWARD several times until
the quadcopter stops moving backward.
If the quadcopter moves forward, push the
Pitch Trim Switch BACKWARD several times
until the quadcopter stops moving forward.
USiNg THE gPS fLigHT MODE
The Apollo A1 quadcopter features a GPS Flight Mode that provides Auto-Hover, Auto-Hover with Head Lock Position
Hold and Auto-Hover with Head Free Position Hold. Using the GPS Flight Mode allows you manually fly the quadcopter
to the desired altitude and position, then have the GPS hold that altitude and position, allowing you to control the
camera gimbal to shoot amazing, stable aerial video.
Three GPS Flight Modes can be programmed to the Flight Mode Switch GPS Mode (2) position as listed below. In
the default configuration, GPS Set Altitude (Head Lock) is programmed, and this is the mode we recommend you
use. For more information about these different Flight Modes, see the next page.
• Manual Set Altitude
•
GPS Set Altitude (Head Lock) - Default
• GPS Set Altitude (Head Free)
To change which GPS Flight Mode the Flight Mode Switch will control when moved to the GPS Mode (2)
position, see the Autopilot Configuration Programming section on pages XX and XX.

































































