


























In-Radar Lane-By-Lane Counts
Both PD420 and PD420 can keep date/time stamped accumulated counts of vehicles in
each lane and periodically save off this data in internal non-volatile memory.
The PD420 radar with the 20x60 degree beam angle is suggested for best count accuracy.
This minimizes the merging of the target return signal of closely following vehicles in far
lanes where the radar beam has diverged past the width of a typical car.
There is adequate memory to save the last 4+ months of data. After that the log will roll
over and start overwriting the oldest data.
On a typical road with a free flowing traffic, the PD420 can be better than 98% accurate
on a lane-by-lane basis and better than 99% accurate on a direction basis.
For best accuracy, the radar should be setup in highway mode and traffic must be moving
faster than 7mph (11kph).
Note: The radar keeps approximately the last one-hour worth or records of data in
internal RAM before committing it to flash to minimize the wear of the flash memory.
This data is also committed to flash whenever the user issues an external read command
of this memory. Thus, it is advisable to issue a read command of the memory before
removing power from the radar.
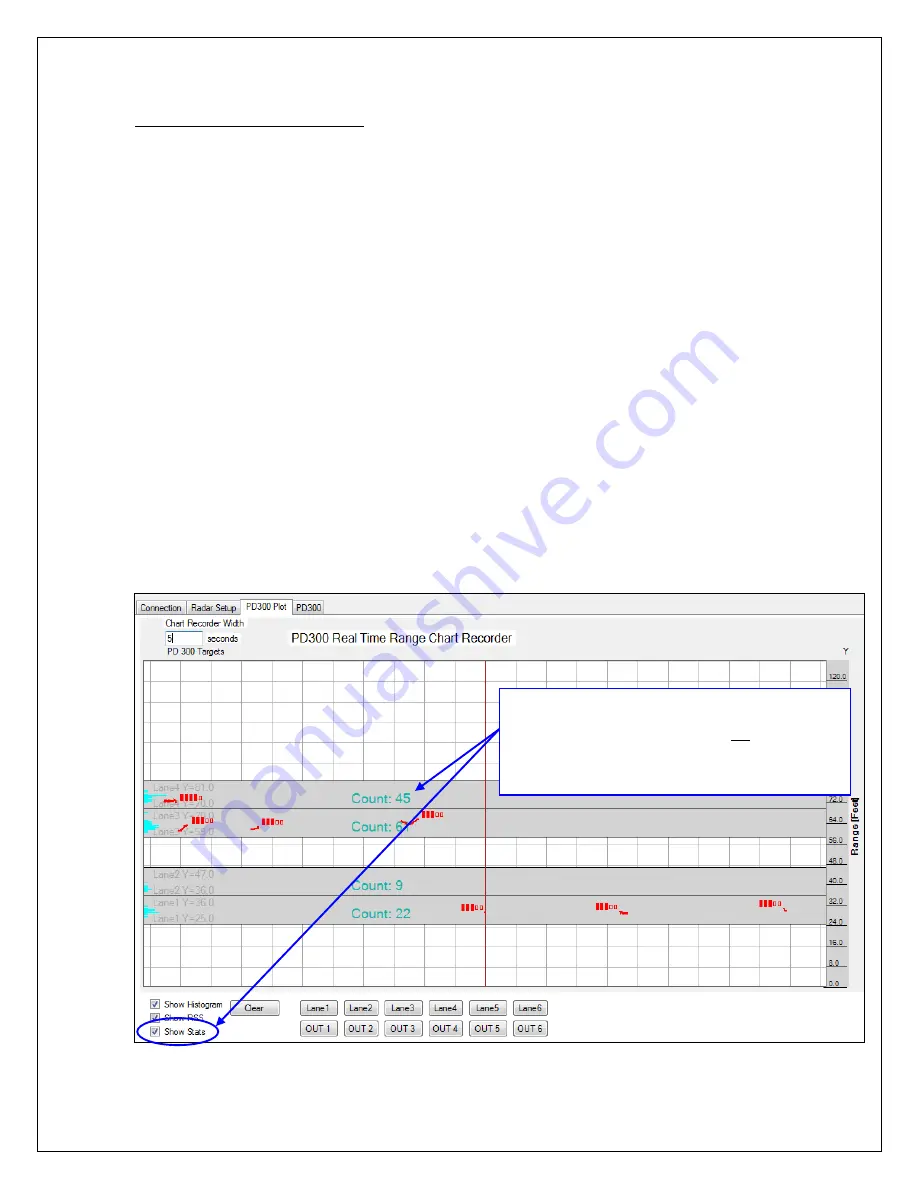
The Real Time Range Chart Recorder Plot has a helpful “counts per lane” feature that you
can use to verify the accuracy of lane-by-lane counts during initial setup.
The range plot can keep track of counts on a lane-by-
lane basis to assist you in comparing with actual
counts on the road. Note: These are not the counts
logged by radar in internal memory, but counts kept by
the PC program after it has established connection to
the radar.







































































