
















55
1019658 11/2014
Repeatability [arcmin]
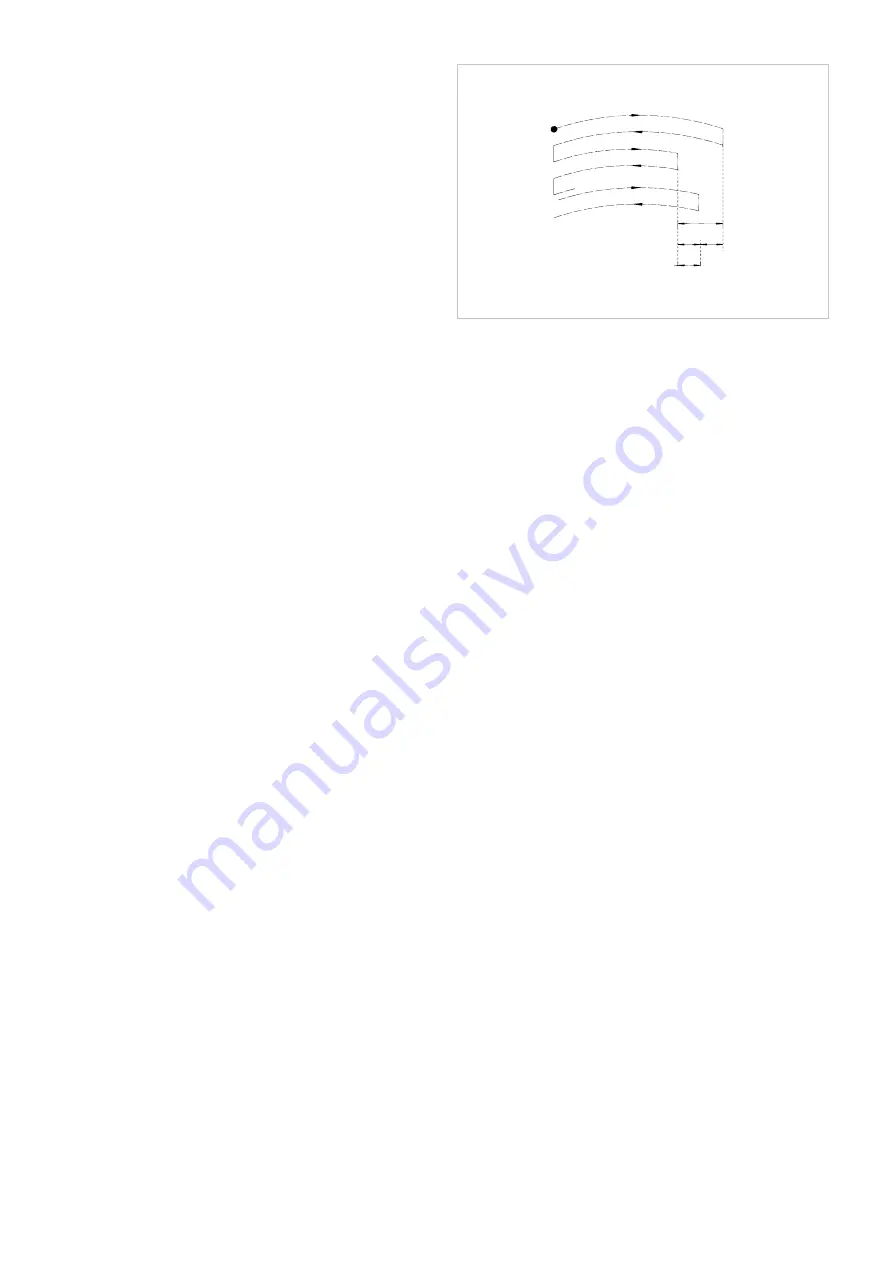
The repeatability of the gear describes the position differ-
ence measured during repeated movement to the same
desired position from the same direction. The repeatability
is defined as half the value of the maximum difference
measured, preceded by a ± sign.
Repeatable peak torque T
R
[Nm]
Specifies the maximum allowable acceleration and braking torques. During the normal operating cycle the repeatable peak
torque T
R
should be not be exceeded.
Resistance (L-L, 20° C) R
L-L
[Ω]
Winding resistance measured between two conductors at a winding temperature of 20° C.
Size
1) Actuators / Gears with Harmonic Drive® gears or Harmonic Planetary gears
The frame size is derived from the pitch circle diameter of the gear teeth in inches multiplied by 10.
2) CHM Servo motor series
The size of the CHM servo motors is derived from the stall torque in Ncm.
3) Direct drives from the TorkDrive® series
The size of the TorkDrive® series is the outer diameter of theiron core of the stator.
Static load rating C
0
[N]
Maximum static load that can be absorbed by the output bearing before permanent damage may occur.
Static tilting moment M
0
[Nm]
With the bearing stationary this is the maximum allowable radial load, with no additional axial forces or tilting moments
applied.
Tilting moment stiffness K
B
[Nm/arcmin]
The tilting angle of the output bearing at an applied moment load.
Torque constant (motor) k
TM
[Nm/A
rms
]
Quotient of stall torque and stall current.
Torque constant (output) k
Tout
[Nm/A
rms
]
Quotient of stall torque and stall current, taking into account the transmission losses.
Repeatability = ±x /2 = ±x /2
φ
1
φ
7
φ
2
x
x/2 x/2







































































