





























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG 17
08.04.2020
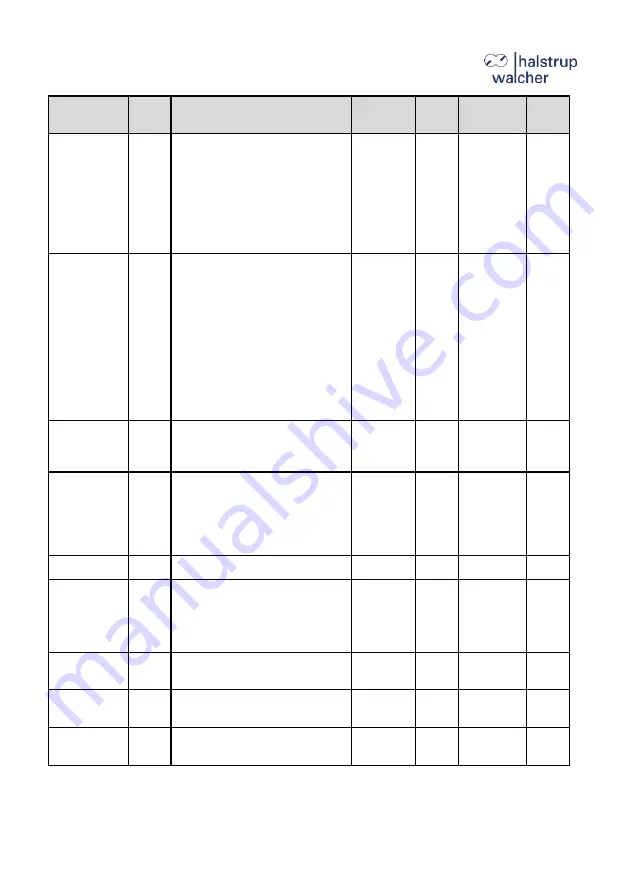
Designation
Index
no.
Function
Range of
values
Back
up?
Delivery
state
R/W
Baud rate
2027
0: 20 kBaud 4: 500 kBaud
1: 50 kBaud 5: 800 kBaud
2: 125 kBaud 6: 1000 kBaud
3: 250 kBaud
If the baud rate switch is in use
(i.e. switch position not set to
OFF-OFF-OFF), this value
cannot be changed.
0...6
16 bit
yes
4
R/W
Upper
mapping
end
2028
Definition of the positioning
range relative to the absolute
value encoder
Permissible values:
(current po 3
revolutions) …
(current po 4029
revolutions)
For models with an auxiliary
gearbox, the range of values is
reduced in accordance with the
gear ratio.
31 bit
Yes
see
chap. 3.3
R/W
Maximum
holding
current
202B Holding torque at standstill in
mA
see
chap. 3.3
16 bit
Yes
see
chap. 3.3
R/W
Direction of
rotation
202C 0: Clockwise
(when looking at the output
shaft)
1: Counterclockwise
0 or 1
16 bit
Yes
0
R/W
Actual rpm
2030
Current speed in rpm
±15 bit
R
Max. actual
current
during last
run
2031
Max. actual current during last
run in mA
16 bit
R
Actual
current
2033
Actual current in mA
16 bit
R
U control
203A Current supply voltage to
control unit, in 0.1 V
16 bit
R
U motor
203B Current supply voltage to
motor, in 0.1 V
16 bit
R







































































