





























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG
16
08.04.2020
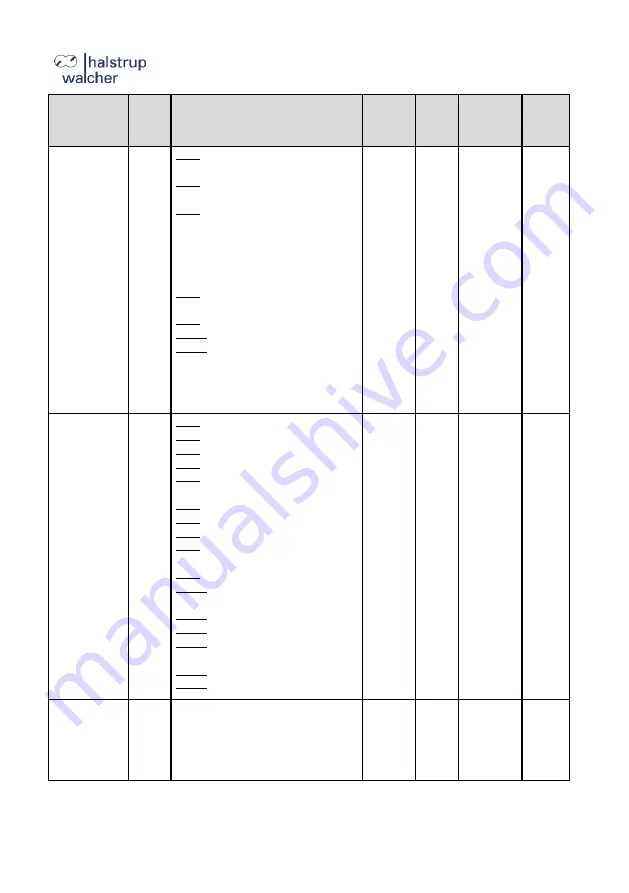
Designation
Index
no.
Function
Range
of
values
Back
up?
Delivery
state
R/W
Control word 2024
Bit 0:
Manual run to larger
values
Bit 1:
Manual run to smaller
values
Bit 2:
Assign target value
(when transferring a
target value with PDOs,
the positioning run is
only started if this bit is
set.)
Bit 4:
Release: The axle will
only run if this bit is set.
Bit 6:
Run without loop
Bit 10:
Adjustment release
Bit 13:
Togglebit
All other bits are reserved and
must be set to 0
16 bit
No
0
R/W
Status
2025
Bit 0:
Target position reached
Bit 1:
reserved
Bit 2:
Togglebit
Bit 3:
reserved
Bit 4:
Power available to
motor
Bit 5:
Positioning run aborted
Bit 6:
Drive is running
Bit 7:
Temperature too high
Bit 8:
Movement opposite to
loop direction
Bit 9:
Error
Bit 10:
Positioning error
(obstruction)
Bit 11:
Manual rotation
Bit 12:
Incorrect target value
Bit 13:
Motor power not
available
Bit 14:
Positive range limit
Bit 15:
Negative range limit
0..FFFFh
16 bit
R
CAN
address
2026
Address of the drive (if the
address is set via the CAN bus)
If the address switches are used
(i.e. switch position set to > 0),
this value cannot be changed.
1...127
16 bit
Yes
1
R/W







































































