2
IT
ALIANO
3X1,5mm
2
2
2
5
4
1
230V~
3x0,5 mm
2
2x0,5 mm
2
2x0,5 mm
2
2x1,5 mm
2
3x0,5 mm
2
3
1
2
3
4
5
6
7
8
9
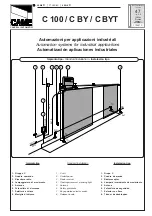
AUTOMAZIONE MILORD
1) Operatore con apparecchiatura elettrica incorporata
(prevedere apposita piastra di fondazione)
2) Fotocellule
3) Pulsante a chiave
4) Lampeggiatore
5) Ricevente
Note:
1) Per la messa in opera dei cavi elettrici utilizzare adeguati
tubi rigidi e/o flessibili
2) Separare sempre i cavi di collegamento degli accessori a
bassa tensione da quelli di alimentazione a 230 V~. Per
evitare qualsiasi interferenza utilizzare guaine separate
L’automazione MILORD per cancelli scorrevoli residenziali è un
operatore elettromeccanico che trasmette il movimento all’an-
ta tramite un pignone accoppiato opportunamente ad una
cremagliera fissata sul cancello.
Il sistema irreversibile garantisce il blocco meccanico quando il
motore non è in funzione e quindi non occorre installare alcuna
serratura. Un comodo sblocco rende manovrabile il cancello in
caso di black-out o disservizio.
Questo operatore è privo di frizione meccanica, quindi necessi-
ta di una apparecchiatura di comando con frizione elettroni-
ca.
Gli operatori MILORD nelle versioni “C” hanno l’apparecchiatu-
ra elettronica integrata nel corpo dell’operatore
1. DESCRIZIONE E CARATTERISTICHE TECNICHE
Caratteristiche tecniche operatori
2. PREDISPOSIZIONI ELETTRICHE
(impianto standard)
3. INSTALLAZIONE DELL’AUTOMAZIONE
3.1. VERIFICHE PRELIMINARI
Per un corretto funzionamento dell’automazione la struttura del
cancello esistente, o da realizzare, deve presentare i seguenti
requisiti:
• il peso del cancello deve corrispondere a quanto indicato
nella tabella delle caratteristiche tecniche;
• struttura dell’anta robusta e rigida;
• superficie dell'anta liscia (priva di sporgenze);
• movimento regolare ed uniforme dell’anta, privo di attriti du-
rante tutta la corsa;
• assenza di oscillazioni laterali dell’anta;
• ottimo stato dei sistemi di scorrimento inferiore e superiore.
L’utilizzo di una guida a terra a gola arrotondata è preferibile
per ottenere degli attriti di scorrimento ridotti.
• presenza di solamente due ruote di scorrimento;
• presenza degli arresti meccanici di sicurezza per evitare pe-
ricoli di deragliamento del cancello; tali arresti devono essere
fissati saldamente al suolo o sulla guida a terra circa 40 mm
oltre la posizione di finecorsa.
• assenza di serrature meccaniche di chiusura.
Si raccomanda di effettuare gli eventuali interventi fabbrili pri-
ma d’installare l’automazione.
Lo stato della struttura influenza direttamente l’affidabilità e la
sicurezza dell’automazione.
3.2. INSTALLAZIONE DELL’OPERATORE
1) Assemblare la piastra di fondazione come da Fig.3.
2) Eseguire uno scavo per la piastra di fondazione come da fig.
4. La piastra di fondazione deve essere posizionata come da
fig. 5 (chiusura destra) o fig. 6 (chiusura sinistra) per garantire
il corretto ingranamento tra il pignone e la cremagliera.
Nota bene: È consigliabile collocare la piastra su un basamento
di cemento a circa 50 mm dal suolo (fig. 7).
3) Mettere in opera i tubi flessibili necessari per il passaggio dei
cavi di collegamento tra il motoriduttore, gli accessori e l’ali-
mentazione elettrica. I tubi flessibili devono uscire circa 3 cm
dal foro presente sulla piastra.
1
e
r
o
t
t
u
d
ir
o
t
o
M
6
o
c
it
e
n
g
a
m
e
r
o
s
n
e
S
2
a
r
u
t
r
e
p
o
c
i
d
r
e
t
r
a
C
7
e
n
o
i
z
a
d
n
o
f
i
d
a
r
t
s
a
i
P
3
*
o
d
n
a
m
o
c
i
d
e
l
a
r
t
n
e
C
8
e
n
o
n
g
i
P
4
*
*
e
l
a
d
i
o
r
o
t
e
r
o
t
a
m
r
o
f
s
a
r
T
9
o
c
c
o
l
b
s
i
d
o
v
it
is
o
p
si
D
5
*
*
r
e
d
o
c
n
E
"
C
"
i
n
o
ir
e
v
e
ll
e
n
o
l
o
s
e
ir
e
s
i
D
*
C
4
2
4
D
R
O
L
I
M
o
ll
e
d
o
m
r
e
p
o
l
o
S
*
*
o
ll
e
d
o
M
D
R
O
L
I
M
C
5
-
5
D
R
O
L
I
M
C
4
2
4
-
4
2
4
D
R
O
L
I
M
C
8
-
8
e
n
o
i
z
a
t
n
e
m
il
A
~
V
0
3
2
z
H
0
5
c
d
V
4
2
~
V
0
3
2
z
H
0
5
a
ti
b
r
o
s
s
a
a
z
n
e
t
o
P
W
0
5
3
W
0
7
W
0
0
5
o
t
n
e
m
i
b
r
o
s
s
A
A
5
.
1
A
3
A
2
.
2
o
c
ir
t
t
e
l
e
e
r
o
t
o
m
n
i
m
/
ir
i
G
0
0
4
1
o
t
n
u
p
s
i
d
e
r
o
t
a
s
n
e
d
n
o
C
F
µ
0
1
V
0
0
4
/
F
µ
5
.
2
1
V
0
0
4
e
n
o
i
z
u
d
ir
i
d
o
t
r
o
p
p
a
R
5
2
:
1
e
n
o
n
g
i
P
6
1
Z
a
r
e
il
g
a
m
e
r
C
4
o
l
u
d
o
m
x
a
m
a
i
p
p
o
C
m
N
8
1
m
N
5
.
3
1
m
N
4
2
x
a
m
a
t
n
i
p
S
N
a
d
5
4
N
a
d
0
4
N
a
d
5
6
e
n
o
i
z
e
t
o
r
p
o
m
r
e
T
o
t
n
e
m
i
g
l
o
v
v
a
'l
l
u
s
C
°
0
4
1
/
C
°
0
4
1
o
z
z
il
it
u
i
d
a
z
n
e
u
q
e
r
F
%
0
3
%
0
0
1
%
0
4
e
t
n
e
i
b
m
a
a
r
u
t
a
r
e
p
m
e
T
C
°
5
5
+
C
°
0
2
-
e
r
o
t
a
r
e
p
o
o
s
e
P
g
K
0
1
g
K
1
1
e
n
o
i
z
e
t
o
r
p
i
d
o
d
a
r
G
4
4
P
I
o
ll
e
c
n
a
c
x
a
m
o
s
e
P
g
K
0
0
5
g
K
0
0
4
g
K
0
0
8
o
ll
e
c
n
a
c
à
ti
c
o
l
e
V
n
i
m
/
m
2
1
o
ll
e
c
n
a
c
x
a
m
a
z
z
e
h
g
n
u
L
m
5
1
F
IG
. 1
F
IG
. 2