





























15
Three mechanisms are provided
:
low power alarm, low power return
,
and emergency low power
landing.
Low power alert
If the remaining power is 30% or less of total power, the low power alert will be triggered, the red
indicator will flash slowly, and the GDU Mini App will remind the user of the low power levels.
Low power return
If the remaining power is 20% or less of total power, the aircraft will be forced to return
automatically. During the return process, the aircraft can be controlled by remote controller
(assuming standard signal levels).
Emergency low power landing
If the remaining power is 8% or less of total power, this will constitute a power emergency, and
the aircraft will be forced to land vertically.
※
The throttle lever can be adjusted to position the aircraft into a more appropriate position before
landing.
※
If the battery power is too low for the aircraft to return, the user should immediately land the aircraft.
3. Communication loss return
If the GPS signal is strong, and the compass is operating normally, then a return point will be
successfully recorded by the aircraft. If the remote controller’s signal is interrupted, the aircraft
will remain hovering. If the duration of signal interruption exceeds 3s, the aircraft will
automatically return. Under WIFI control, if the duration of APP signal interruption exceeds 30s,
the aircraft will then also return automatically. If normal signal conditions are recovered during
the return process, the aircraft will continue returning, but the user can press the “Return” button
on the remote controller or click “
” on the GDU Mini App interface to exit the return
process.
※
WIFI control is only applicable to GDU O2.
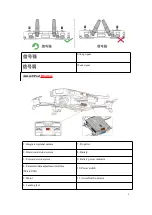
Vision Position System
The vision position system includes the forward vision system and the downward vision system.
The forward vision system on two sides of the nose includes two lenses, and used for sensing
obstacles by visual distance identification. The downward vision system at the bottom of the
aircraft includes optical and ultrasonic sensors, and used to obtain the location information of the
aircraft with optical sensor to provide the location reference along the horizontal axis. The current
flight height can be judged through ultrasonic sensor, thus providing a vertical height reference
and allowing flight at a fixed height.







































































