











VG-450 User Manual
9
1. Start the ros master node
2. Start R300 simulation, including simulation environment, UGV model, sensor
simulation, TF, etc.
3. Keyboard control node to control the movement of UGV
4. 2D mapping function, mainly using 2D lidar data for mapping
5. The rviz visual interface, which is set for the SLAM 2D mapping function, displays
maps and UGV models.
Open a terminal arbitrarily, drag the r300_simulation_slam.sh file into the terminal
window, and a command to start the sh script will appear. Press Enter to start it.
Check the terminal window that pops up and whether the nodes in each terminal are
started normally. After confirming that the nodes are running normally, enter the
corresponding control instructions in the third keyboard-controlled terminal to control
the movement of the UGV for 2D mapping.
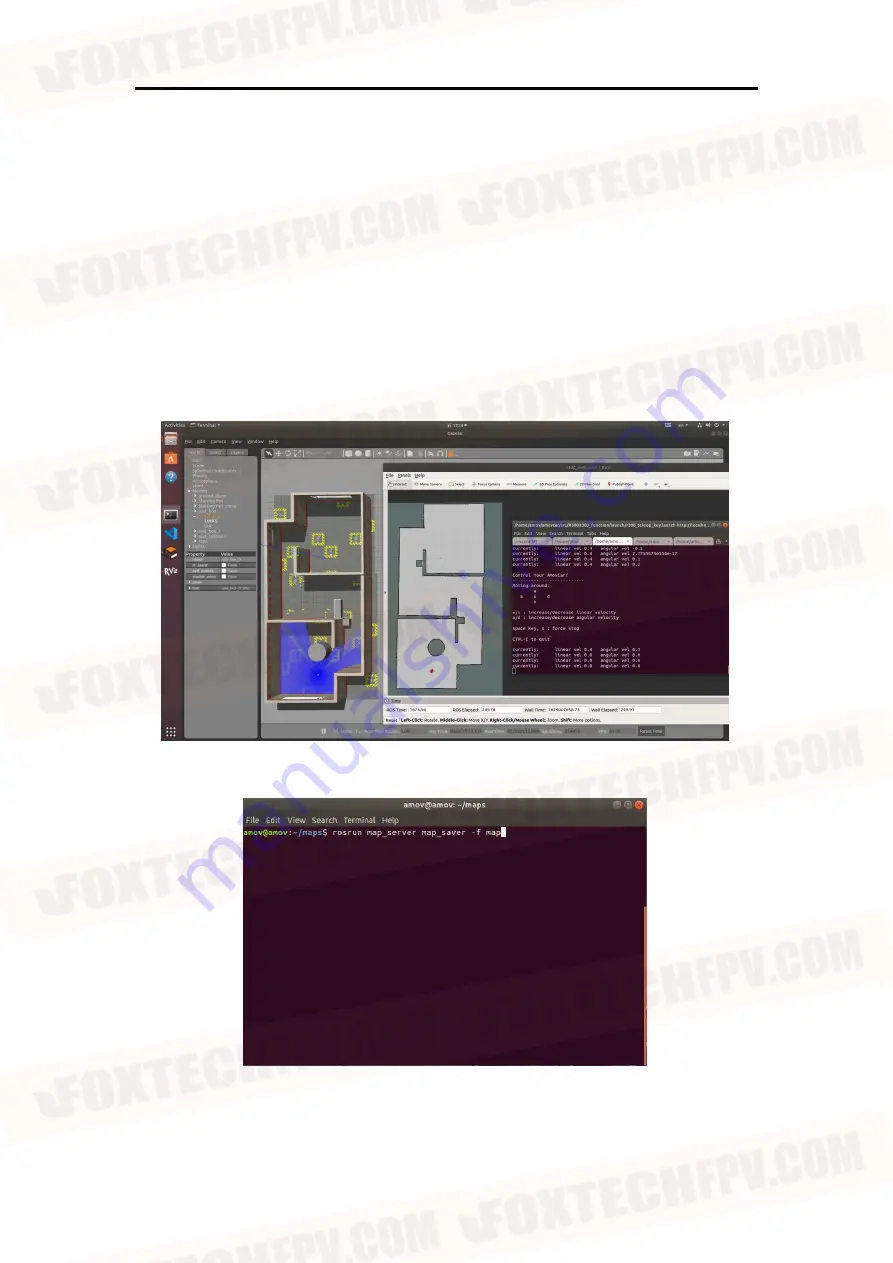
After the map is created, you can enter the following command to save the map:
rosrun map_server map_saver -f map_name
After entering this command, files in .pgm and .yaml formats will be generated in the
current folder, and the saved map file map.yaml and map.pgm can be viewed through
the ls command.