





























Summa Series Servodrive Product Manual
Tuning
Document Version: V1.01
(Dec, 2019)
© 2019 ESTUN Automation Co., Ltd. All right reserved.
9-30
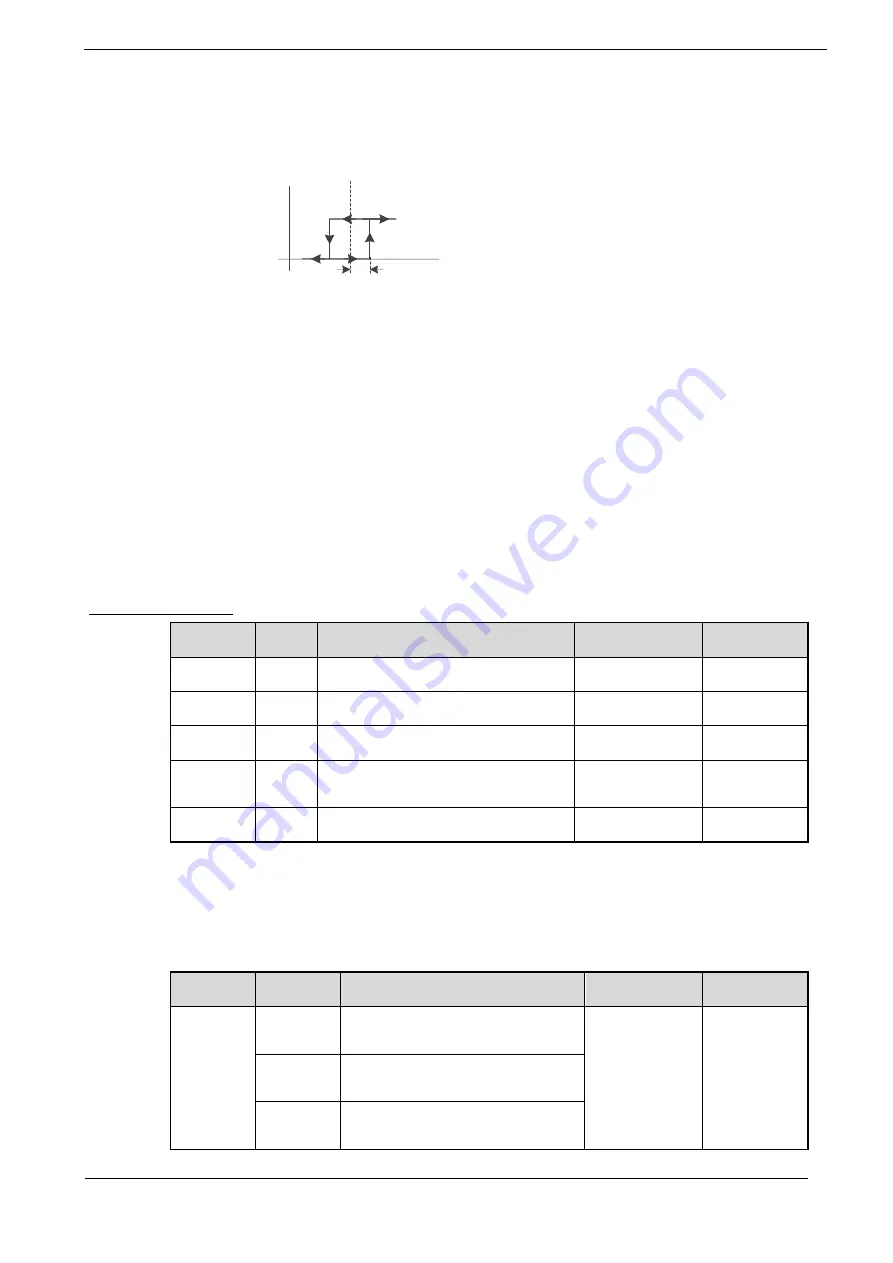
In this case, you can set a proper Hysteresis for Gain Switch (Pn126) to avoid the error between input
and output, and Figure 9-13 shows the diagram for this setting.
Figure 9-13
Hysteresis for Gain Switch diagram
Threshold for Gain
Switch (Pn123)
Hysteresis for Gain
Switch (Pn126)
Percentage of torque, etc.
Start the gain
switching
Set Pn121 to 8 (Use position reference and actual speed as the condition), indicating that there are two
conditions to be met when switching to the second gain:
−
Condition 1: Hysteresis switching based on position reference, you shall set a proper Threshold
value for Gain Switch (Pn123) and Hysteresis for Gain Switch (Pn126).
This condition is met when the output exceeds the sum of Pn123 and Pn126.
−
Condition 2: Switch based on actual speed judgment, and you shall set a proper Speed Threshold
for Gain Switch (Pn124).
This condition is met when the actual speed exceeds the threshold value.
Both condition 1 and condition 2 are met, switching to second group of gain parameters, otherwise the
first group of gain parameters is used.
Set Pn121 to 9 (Fixed to second group gains), indicating that the second group of gain parameters is
always used.
Relevant Parameters
Parameter Setting Meaning
When Enabled
Classification
Pn122
-
Delay Time for Gain Switch
Immediately
Adjustment
Pn123
-
Threshold for Gain Switch
Immediately
Adjustment
Pn124
-
Speed Threshold for Gain Switch
Immediately
Adjustment
Pn125
-
Ramp Time for Position Loop Gain
Switch
Immediately
Adjustment
Pn126
-
Hysteresis for Gain Switch
Immediately
Adjustment
9.5.2
P / PI Switching
The Drive uses the Proportional-Integral Controller by default to adjust the speed loop. You can set Pn116
(P/PI Switch Mode) for switching to the Proportional Controller when the set condition is met.
Parameter Setting
Meaning
When Enabled Classification
Pn116
0 [Default]
Use torque reference as the condition
(threshold setting: Pn117).
After restart
Function
1
Use position deviation counter as the
condition (threshold setting: Pn118).
2
Use acceleration reference as the
condition (threshold setting: Pn119)







































































