




























SVENSKA
108
Pilknappar (Fig.
B
,
R
)
Pilknapparna (
B
6
och
7
) används för olika funktioner
beroende på laserns driftläge.
• I
Självnivellerande horisontellt
läge
,
används
piltangenterna för att rotera laserriktarens strålning medurs
eller moturs under rotationen, eller justera laserstrålens
position medurs eller moturs under skanningsläge.
• I
självnivellerande vertikalt
läge, används piltangenterna
för att rotera laserriktarens strålning medurs eller moturs
under rotationen, eller justera laserstrålens position medurs
eller moturs under skanningsläge.
• I
Lutningsläge
, används pilknapparna för att luta
laserhuvudet.
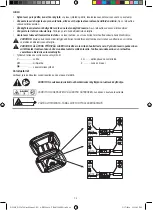
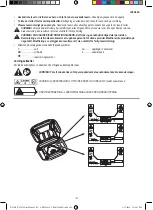
Slå på lasern (fig.
E
,
B
)
1. Sätt i det fullt laddade 18V-batteriet enligt bilden
E
.
2. Tryck försiktigt på strömbrytaren
1
för att slå PÅ lasern.
-
Strömindikatorlampan
9
kommer att lysa upp
-
Självnivellerande läge aktiveras automatiskt och
laserenheten kommer att självnivelleras. När
laserenheten är nivellerad, kommer strålen att rotera en
gång på 600 varv/min medurs.
-
Efter 10 sekunder aktiveras Hi-läge (Anti-Drift)
automatiskt och Hi-lysdioden
8
kommer att lysa upp.
3. Tryck på hastighets-/rotationsknappen
3
för att justera
rotationshastigheten. Riktningen kan ändras med
knapparna
6
och
7
.
4. Tryck på skanningsknappen
4
för att ställa in lasern för att
skanna i 0°, 15°, 45° eller 90° graders läge.
Om du slår PÅ lutningsläge, lyser lutningslampan (
12
). Om
X-axelnivellering används, lyser X-axeldioden (
24
), eller om
Y-axelnivellering används lyser istället Y-axeldioden (
25
).
Kalibrera lasern (Fig. O, P)
Fältkalibreringskontroller ska göras ofta. Det här
avsnittet innehåller instruktioner för att utföra enkla
fältkalibreringskontroller av din
D
e
WALT
Rotationslaser.
Fältkalibreringskontroller kalibrerar inte lasern. Det innebär att
dessa kontroller inte korrigerar fel i laserns nivellerings- eller
rörkapacitet. I stället indikerar kontrollerna huruvida lasern
ger en korrekt nivå och rörledning. Dessa kontroller kan inte
ersättas av professionell kalibrering som utförs av ett
D
e
WALT
servicecenter.
Nivåkalibreringskontroll (X-axel)
1. Montera ett stativ mellan två väggar som är minst 50 meter
från varandra. Stativets exakta placering är inte avgörande.
2. Montera laserenheten på stativet så att X-axeln pekar direkt
mot en av väggarna.
3. Slå på lasern och låt den vara självstyrd.
4. Markera och mät punkterna A och B på väggarna, såsom
visas i Figur O.
5. Vrid hela laserenheten 180º så X-axeln pekar direkt mot
motsatt vägg.
6. Låt laserenheten självnivellera och markera och mäta
punkterna AA och BB på väggarna, enligt Figur P.
7. Beräkna totalfelet med ekvationen:
Totalt fel = (AA - A) - (BB - B)
8. Jämför totalfel med tillåtna gränser, enligt följande tabell.
Avstånd
mellan väggar
Tillåtet fel
DCE074R
Tillåtet fel
DCE079R/G
15 m
3 mm
1,5 mm
20 m
4 mm
2 mm
25 m
5 mm
2,5 mm
30 m
6 mm
3 mm
Nivåkalibreringskontroll (Y-axel)
Upprepa proceduren ovan, men med laserenheten placerad så
att Y-axeln pekar direkt mot väggarna.
Kontroll av Lodfel (Bild Q)
1. Använd ett vanligt vattenpass som referens, markera
toppen och botten av en vägg. (Var noga med att markera
väggen och inte golvet och taket.)
2. Placera rotationslasern säkert på golvet ungefär 3’ (1 m)
från väggen.
3. Sätt på lasern och rikta pricken på märket på väggens
nederdel. Med hjälp av upp/nerpilarna på fjärrkontrollen
roterar du punkten uppåt. Om mitten av punkten skannar
över märket på toppen av väggen, är lasern korrekt
kalibrerad.
OBSERVERA!
Denna kontroll bör göras med en vägg som
inte är kortare än den högsta väggen för vilken denna laser ska
användas.
Använda lasern på ett stativ (fig.
C
)
1. Placera stativet säkert och ställ in önskad höjd.
2. Kontrollera att stativets övre del är någorlunda nivellerat.
Lasern kommer endast att självnivellera om stativets topp
är inom ± 5˚ nivellering. Om lasern är inställd för långt från
nivellering, kommer den att pipa när den når gränsen för sitt
nivelleringsområde. Lasern kommer inte skadas, men den
kommer inte att fungera i ett "icke nivellerat" tillstånd.
DW074_DW079 User Manual - EU - APRIL 2018 - TRANSLATED.indd 108
5/17/2018 12:35:47 PM

























































