























SM-Encoder Plus User Guide
29
Issue Number: 3
www.controltechniques.com
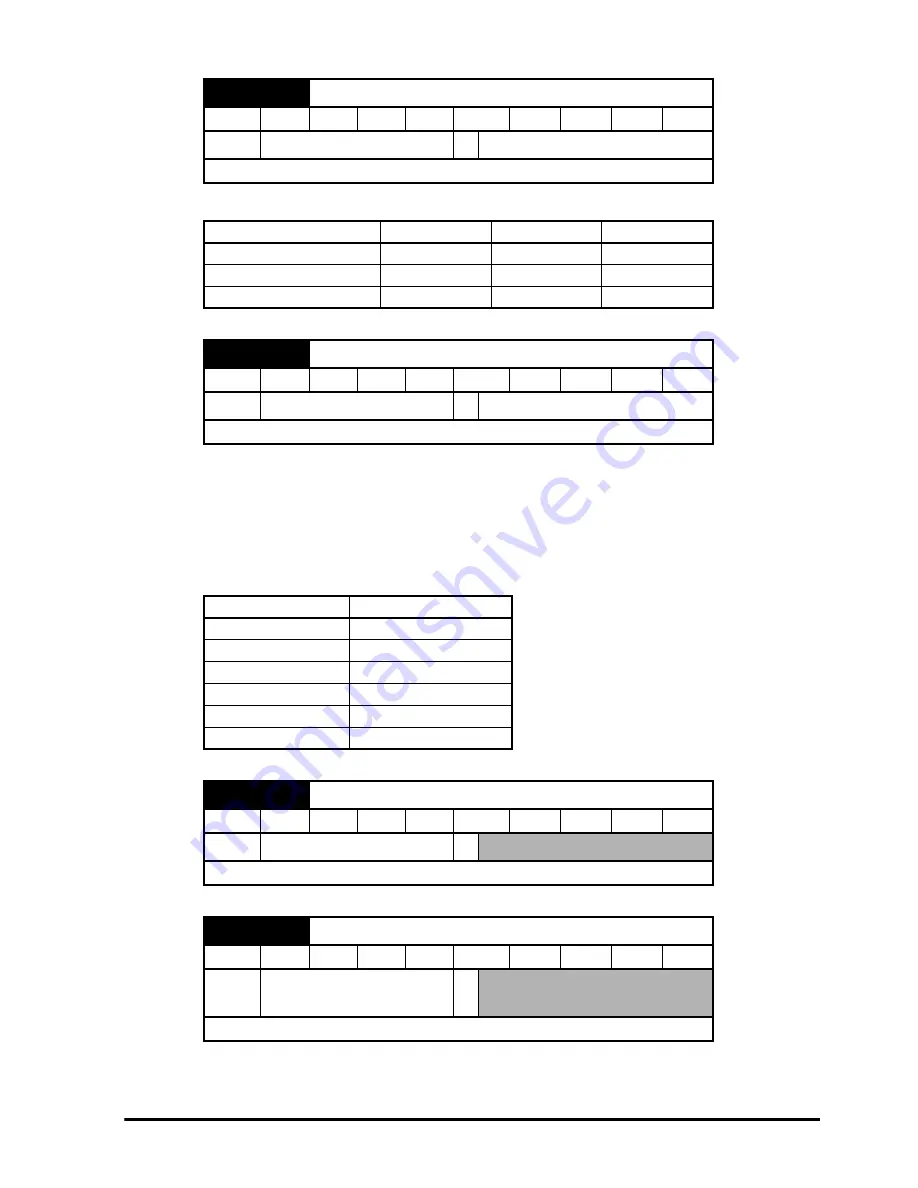
The terminations may be enabled/disabled by this parameter as follows:
A sliding window filter may be applied to the feedback. This is particularly useful in
applications where the feedback is used to give speed feedback for the speed controller
and where the load includes a high inertia, and so the speed controller gains are very
high. Under these conditions, without a filter on the feedback, it is possible for the speed
loop output to change constantly from one current limit to the other and lock the integral
term of the speed controller. The filter is not active if the parameter value is 0 or 1ms,
but operates over the defined window for parameter values of 2, 4, 8 and 16ms.
Pr
x.29
and Pr
x.30
are duplicates of Pr
x.04
and Pr
x.05
respectively and not affected
by the marker or freeze inputs.
x.16
Encoder termination
RW
Txt
US
Ú
0 to 2
Ö
1
Update rate: Background read
Encoder input
x.16=0
x.16=1
x.16=2
A-A\
Disabled
Enabled
Enabled
B-B\
Disabled
Enabled
Enabled
Z-Z\
Disabled
Disabled
Enabled
x.19
Feedback filter
RW
Uni
US
Ú
0 to 5 (0 to 16 ms)
Ö
0
Update rate: Background read
Value in Pr x.19
Filter window
0
Not active
1
Not active
2
2ms
4
4ms
8
8ms
16
16ms
x.29
Non-marker reset revolution counter
RO
Uni
NC
PT
Ú
0 to 65,535 revolutions
Ö
Update rate: 4ms x number of dumb modules
x.30
Non-marker reset position
RO
Uni
NC
PT
Ú
0 to 65,535 (1/2
16
ths of a
revolution)
Ö
Update rate: 4ms x number of dumb modules





















































