





























Technical data
24
8LVA user's manual V1.0
2.9 8LVA1 - Technical data
Size 1
Model number
8LVA13.ee015ffgg-0
8LVA13.ee030ffgg-0
Motor
Nominal speed n
N
[rpm]
1500
3000
Number of pole pairs
4
Nominal torque M
n
[Nm]
0.34
0.32
Nominal power P
N
[W]
53
101
Nominal current I
N
[A]
0.8
1.4
Stall torque M
0
[Nm]
0.36
Stall current I
0
[A]
0.9
1.6
Maximum torque M
max
[Nm]
1
Maximum current I
max
[A]
2.8
5.2
Maximum speed n
max
[rpm]
6600
Torque constant K
T
[Nm/A]
0.42
0.23
Voltage constant K
E
[V/1000 rpm]
25.13
13.61
Stator resistance R
2ph
[Ω]
17.4
5.8
Stator inductance L
2ph
[mH]
30.7
10.2
Electrical time constant t
el
[ms]
1.8
Thermal time constant t
therm
[min]
15
Moment of inertia J [kgcm
2
]
0.03
Mass without brake m [kg]
0.6
Holding brake
Holding torque of the brake M
Br
[Nm]
0.35
Brake mass [kg]
0.1
Moment of inertia for the brake J
Br
[kgcm
2
]
0.013
Recommendations
ACOPOS 8Vxxxx.xx...
1010.50
ACOPOS P3 8EI...
2X2
M
ACOPOSmicro 80VD100Px.xxxx-01
C0XX
Cross section for B&R motor cables [mm
2
]
0.75
Connector size
1.0
Servo drive:
The recommended servo drive / inverter module is designed for 1.1x the stall current. If more than double the amount is needed during the acceleration
phase, the next larger servo drive should be selected. This recommendation is only a guideline; detailed inspection of the corresponding speed/torque characteristic
curve can result in deviations of the servo drive size (larger or smaller).
ACOPOS missing information:
The DC bus voltage must be reduced in order to operate this device with an ACOPOS drive (max. 325 VDC).
ACOPOSmulti:
Operating this device with ACOPOSmulti inverter module is not possible due to the high DC bus voltage when powered from the mains.
NOTE cable:
The suitable cables can be found in the catalog (Book 1) chapter ACOPOSmicro servo drive.
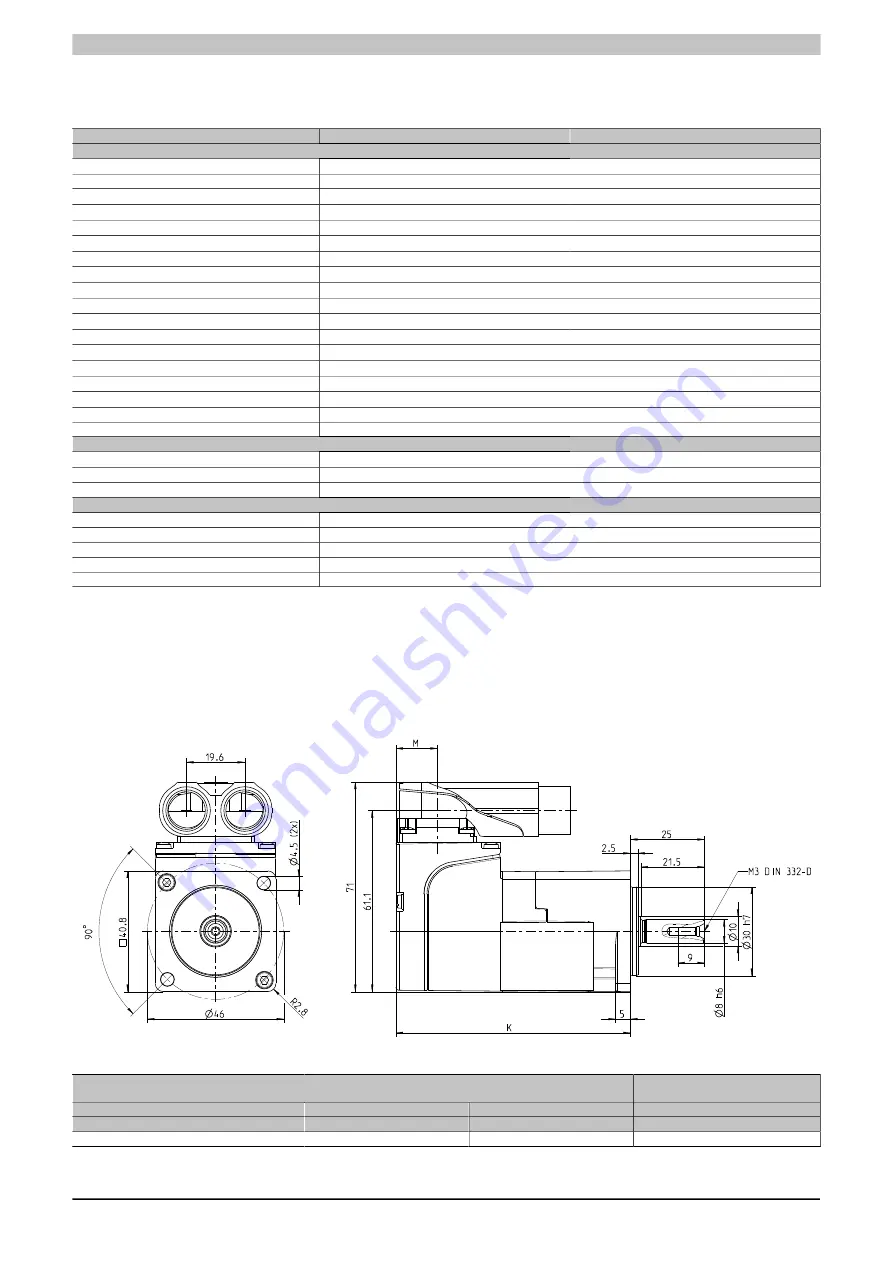
2.9.1 8LVA13 - Dimensions
Double angular built-in connector
EnDat/Resolver feedback
Extension of K depending on motor
option
K
M
Holding brake
Encoder assignments
R0, B1
R0, B1
8LVA13
79.5
14
28







































































