





























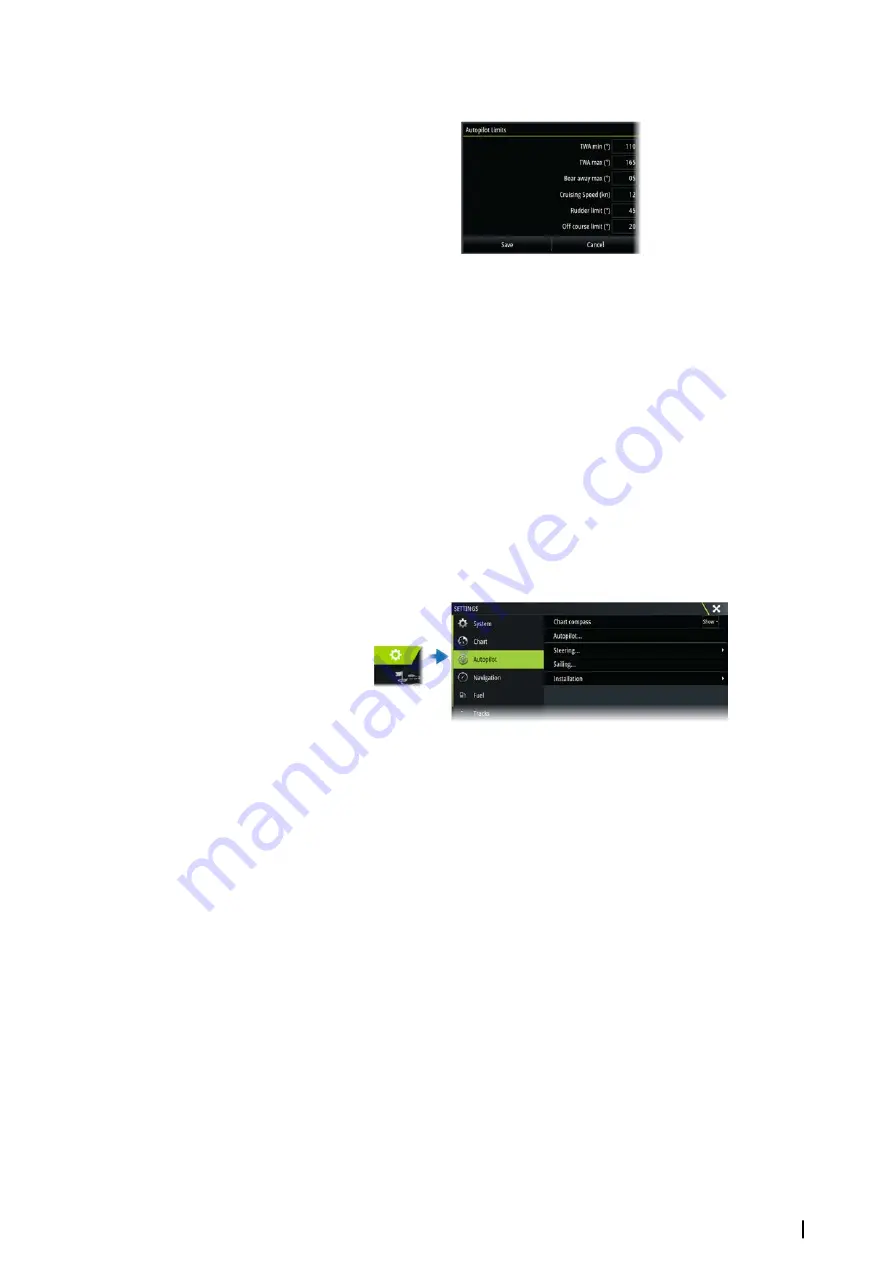
Limits
This option allows for manually changing parameters that were set during the
commissioning of the autopilot computer. For more details of the settings, refer to the
separate documentation for the autopilot computer.
Allows control of the True Wind Angle range where Gust and True Wind Speed response can
be configured and controlled.
•
TWA min: Minimum True Wind Angle that gust and True Wind Speed response operate in.
•
TWA max: Maximum True Wind Angle that gust and True Wind Speed response operate
in.
•
Bear away max: Maximum angle the vessel will bear away during stability control
•
Cruising speed: The preferred cruising speed for this vessel (comfortable and economical)
•
Rudder limit: Determines the maximum rudder movement in degrees from midship
position that the autopilot can command the rudder in the automatic modes. The Rudder
limit setting is only active during autosteering on straight courses, NOT during course
changes. Rudder limit does not affect Non-Follow-up steering.
•
Off course limit: Defines the limit for the off course alarm
NAC-2/NAC-3 specific user settings
Autopilot
Switches the view to the last active page.
Steering
These options allow for manually changing low speed and high speed parameters that were
set during the commissioning of the autopilot computer. For more details, refer to the
separate documentation for the autopilot computer.
Selecting the low speed option or the high speed option opens dialogs the following
parameters can be changed.
•
Turn rate: Preferred turn rate used while turning in degrees per minute.
•
Rudder gain: This parameter determines the ratio between commanded rudder and the
heading error. The higher rudder value the more rudder is applied. If the value is too small
it will take a long time to compensate for a heading error, and the autopilot will fail to
keep a steady course. If the value is set too high the overshoot will increase and the
steering will be unstable.
•
Counter rudder: Relation between change in heading error and applied rudder. Higher
counter rudder will reduce applied rudder faster when approaching the set heading.
•
Auto trim: Controls how aggressively the autopilot will apply rudder to compensate for a
constant heading offset, e.g. when external forces such as wind or current affects the
heading. Lower auto trim will give faster, limitation of a constant heading offset.
•
Init rudder: Defines how the system moves the rudder when switching from manual
steering to an automatic mode.
Autopilot
| Zeus³S Operation Manual
73
Summary of Contents for Zeus3S
Page 1: ...ENGLISH Zeus3 S Operator Manual www bandg com...
Page 2: ......
Page 139: ......
Page 140: ...988 12586 001...






































































