






01.03.2020 v3
2. SPECIFICATIONS AND OPERATING ENVIRONMENT
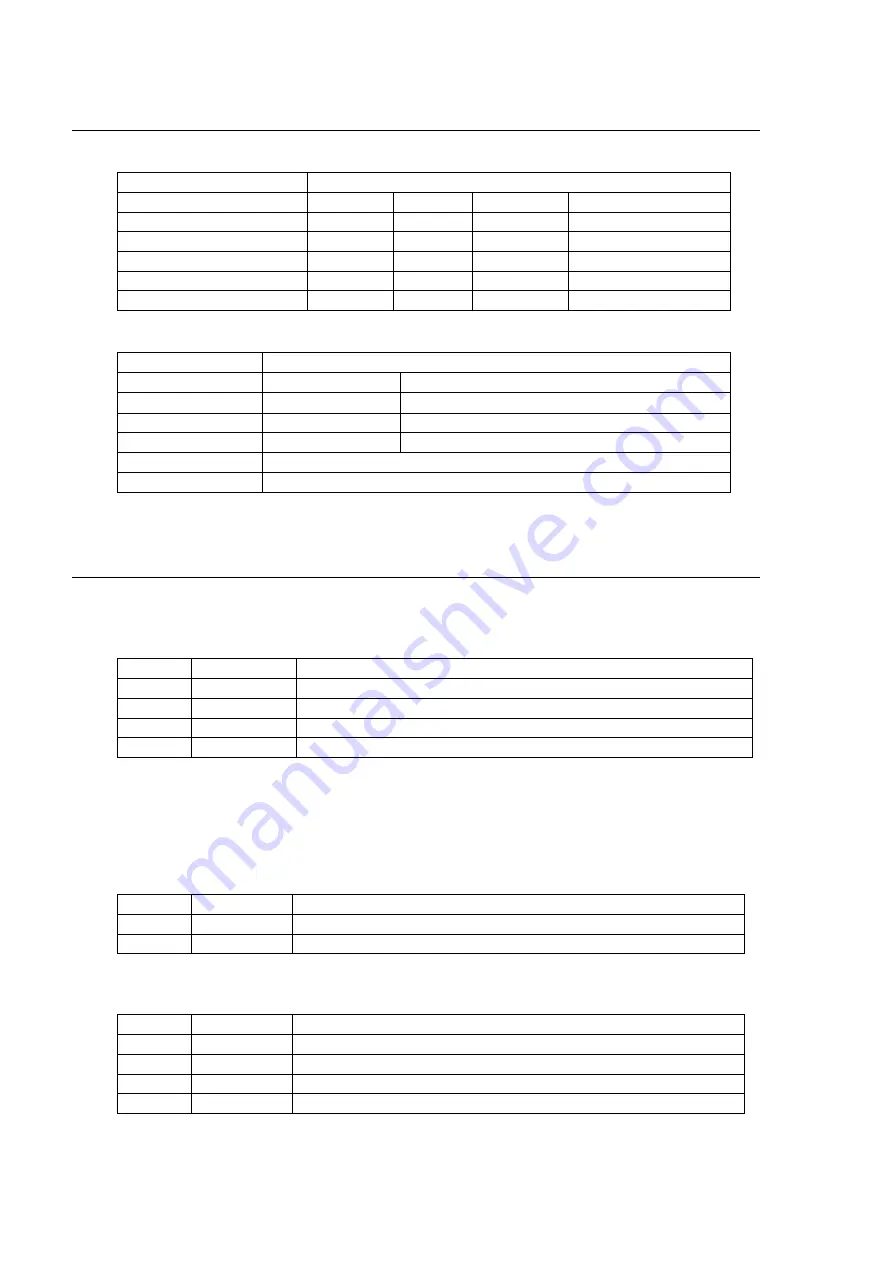
Electrical Specifications (T = 25
C)
Parameters
Min
Typical
Max
Remark
Peak Output Current
1.0A
By User 4.0A
By DIP Switch
Supply Voltage (DC)
+20V
+36V
+50V
Logic Signal Current
6mA
10mA
30mA
Pulse Input Frequency
0
By User 200 kHz
Minimum Pulse Rate
2.5µs
Operating Environment and Parameters
Coolant
Natural Cooling or forced ventilation / heatsink
Environment
Space
Avoid dust, oil, frost and corrosive gases
Temperature
0
C to 50ºC
Humidity
40% to 90%RH
Vibration
5.9m/s
2
Max
Storage Temp.
-20 ºC to +65ºC
Weight
Approx 300g
3. DRIVER CONNECTORS, P1, P2 and P3
The following is a brief description of the two connectors of the Driver.
Control Signal Connector P1 Pins
Pin No.
Signal
Functions
1
Pulse +
Connect to +5v dc
2
Pulse -
Triggers motor to move
3
Dir
Connect to +5v dc
4
Direction -
Triggers change in direction of rotation
Please note motion direction is also related to motor-drive wiring. Changing the
connection of two-wires for a coil to the drive will also reverse motion direction.
SW4 OFF for Pulse and Direction and On for CW/CCW operation.
Power Connector P2 Pins
Pin No.
Signal
Functions
5
Connect to +5 vdc
6
Enable -
Connect to 0v to disable drive
Power Connector P3 Pins
Pin No.
Signal
Functions
7
Ground
Negative Power Supply 0v
8
VCC
Power 20V to +50V dc
9, 10
Phase A
Motor coil A (leads A+ and A-)
11, 12
Phase B
Motor coil B (leads B+ and B-)
Page 2







































































