





























Communication extension card
-68-
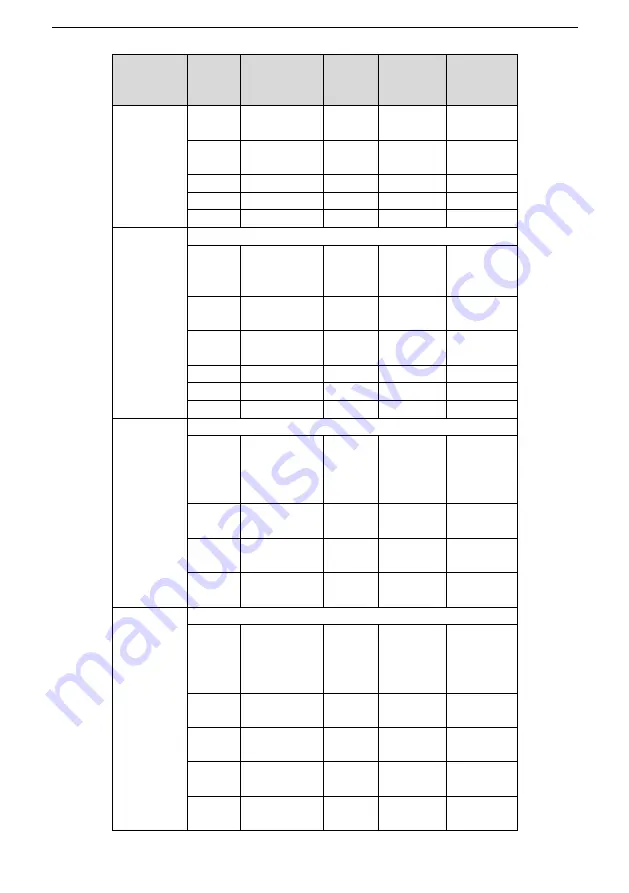
Index
(hexadecimal)
Subindex
Description
Access
permissio
n
Data type Default value
1
COB-ID used by
PDO
RW
Unsigned32
/
2
Transmission
type
RW
Unsigned8
/
3
/
/
Unsigned16
/
4
/
/
Unsigned8
/
5
Event timer
RW
Unsigned16
/
1403
PDO4 Rx communication parameters
0
Supported Max.
number of
subindexes
RO
Unsigned8
/
1
COB-ID used by
PDO
RW
Unsigned32
/
2
Transmission
type
RW
Unsigned8
/
3
/
/
Unsigned16
/
4
/
/
Unsigned8
/
5
Event timer
RW
Unsigned16
/
1600
PDO1 Rx mapping parameters
0
Number of
application
program objects
mapped in PDO
RW
Unsigned8
3
1
First mapped
object
RW
Unsigned32 0x21000010
2
Second mapped
object
RW
Unsigned32 0x21000110
3
Third mapped
object
RW
Unsigned32 0x21000210
1601
PDO2 Rx mapping parameters
0
Number of
application
program objects
mapped in PDO
RW
Unsigned8
4
1
First mapped
object
RW
Unsigned32 0x21010010
2
Second mapped
object
RW
Unsigned32 0x21000310
3
Third mapped
object
RW
Unsigned32 0x21000410
4
Fourth mapped
object
RW
Unsigned32 0x21000510





















































