





























70
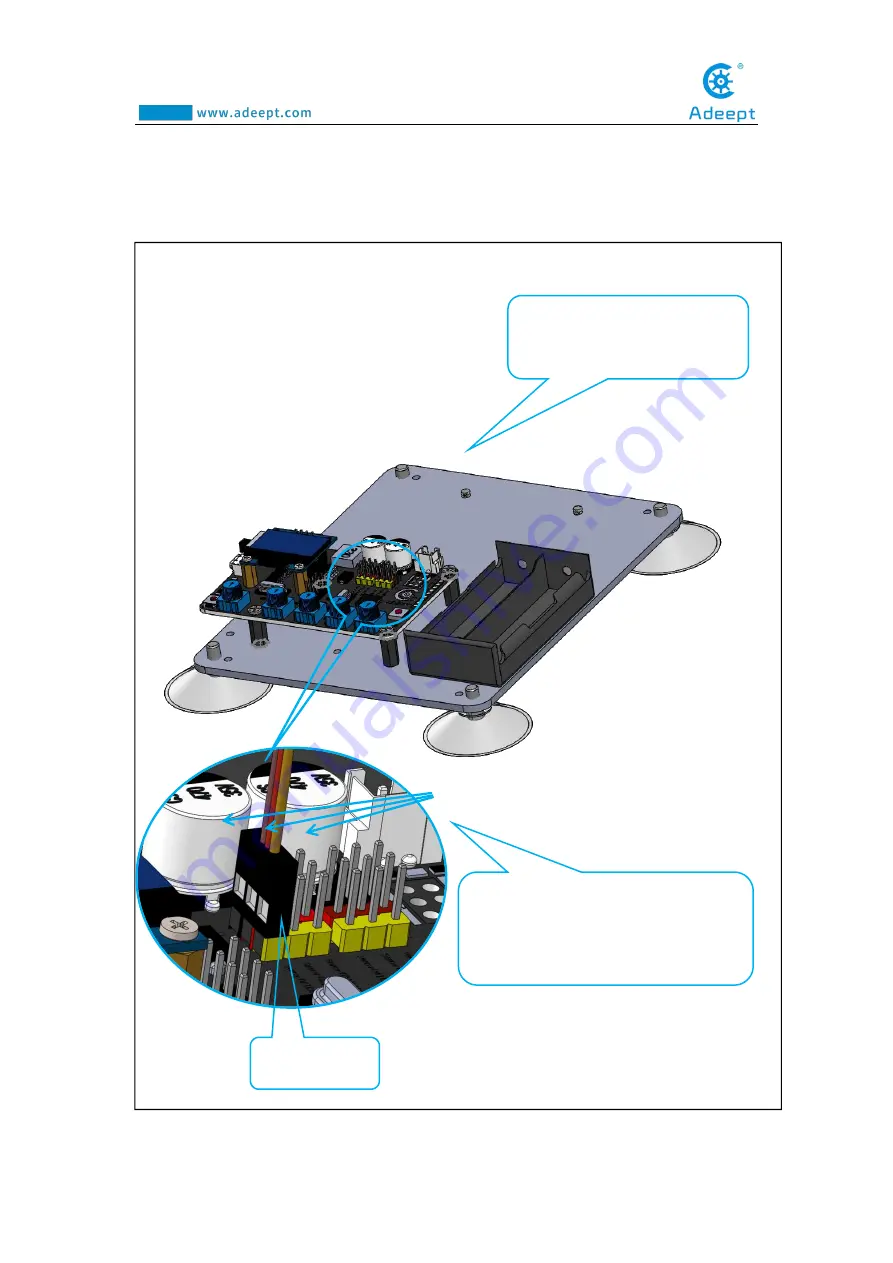
Connect five servos to the Adeept Arm Drive Board.
6.1.3 Turnplate and Rocker Arm Assembly
Servo debugging
(
If you have already adjusted the steering gear to 90 degrees according to
Lesson 5, then you don
’
t need to adjust it anymore, please proceed to the next part
)
`
Connect No. 1-5 servo, and increase from
No. 1-5 in the direction close to the oled
screen. Note that the direction of the Servo
interface should not be reversed
For convenience to read, only one
end of the servo power cable is
shown here.
This is the No. 1
servo
Summary of Contents for Robotic Arm
Page 1: ...1...
Page 33: ...30 9 Running effect is as follow...
Page 74: ...71 SERVO of number 5 4 2 1 3...
Page 86: ...83 Effect diagram after assembling...
Page 95: ...92 40mm 60mm 66 5mm 65mm 13mm 70mm...
Page 99: ...96...
Page 111: ...108...
Page 137: ...134...
Page 154: ...151 7 the library file controlP5 needs to be added...
Page 156: ...153 9 Click Run 10 Running effect is as follow...
Page 164: ...161...
Page 181: ...178...
Page 182: ...179...





































































