





























159
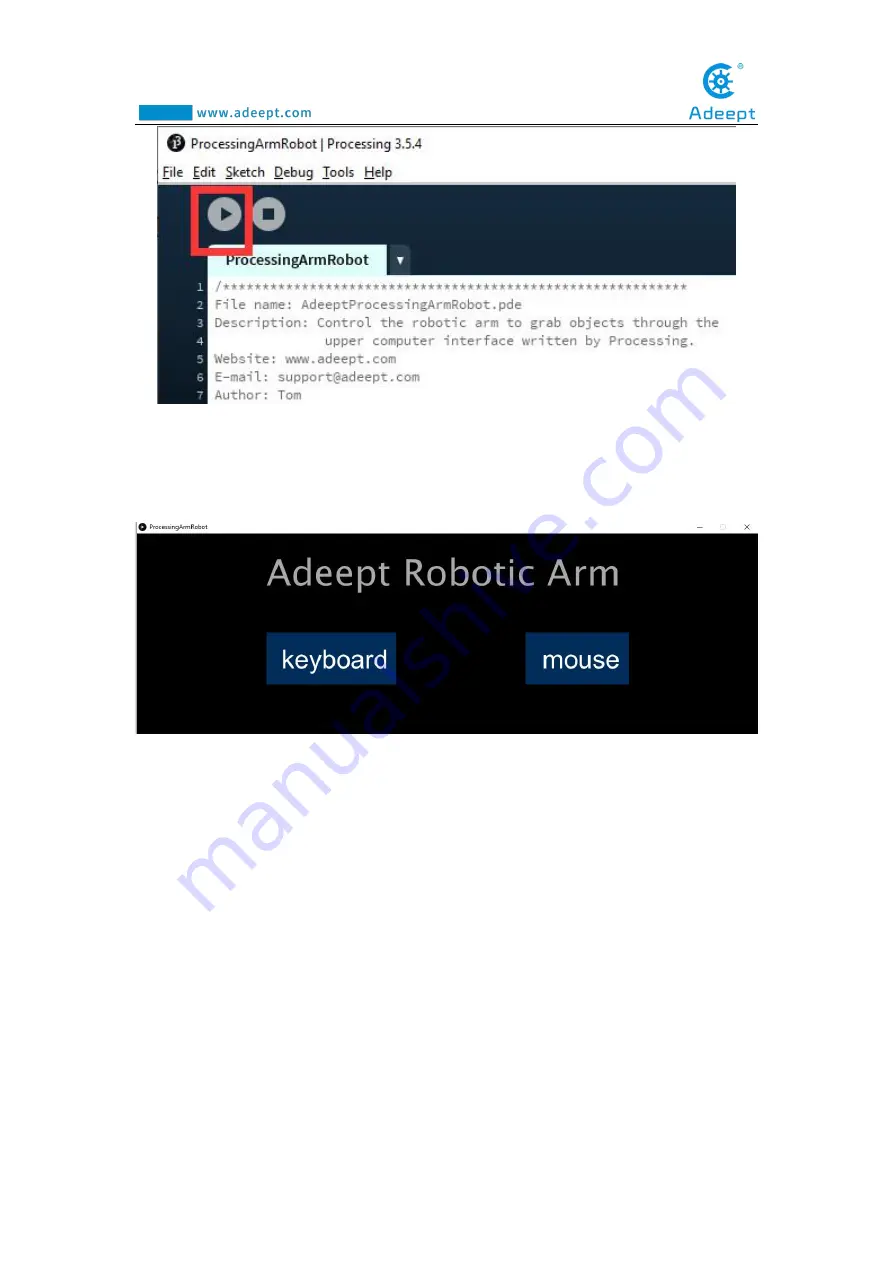
5.The interface of successful running is as below,Provides two ways to control
the robotic arm:keyboard and mouse.
6.Click "keyboard" the following interface will appear. Next, press the
corresponding button on the keyboard to control the arm.
1."Q" and "W" control servo5 (Gripper), The “Q” button is to control the gripper
to open, the “W” button is to control the gripper to close.
2."E" and "R" control servo4 (Rotate),"E" button is to turn to the left,"R" button
is to turn to the right.
3."T" and "Y" control servo3 (Elbow).
4."U" and "I" control servo2 ( Shoulder).
5."O" and "P" control servo1 (Base).
Summary of Contents for Robotic Arm
Page 1: ...1...
Page 33: ...30 9 Running effect is as follow...
Page 74: ...71 SERVO of number 5 4 2 1 3...
Page 86: ...83 Effect diagram after assembling...
Page 95: ...92 40mm 60mm 66 5mm 65mm 13mm 70mm...
Page 99: ...96...
Page 111: ...108...
Page 137: ...134...
Page 154: ...151 7 the library file controlP5 needs to be added...
Page 156: ...153 9 Click Run 10 Running effect is as follow...
Page 164: ...161...
Page 181: ...178...
Page 182: ...179...







































































