





























57
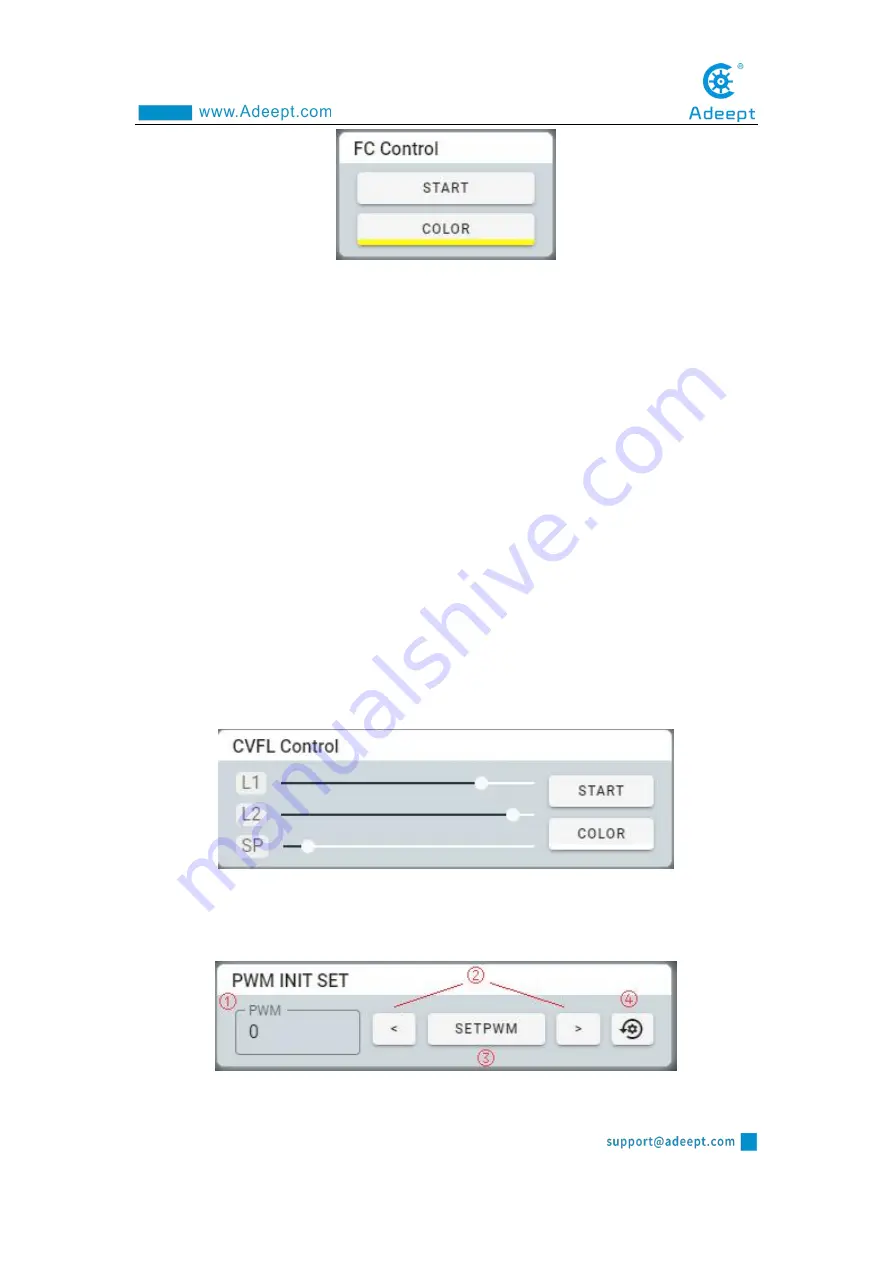
COLROR: choosing the color you want to track.
START: switching color tracking mode.
2.5.3 CVFL Control Module
The switch that controls the visual patrol function.
L1, L2: the two parameters L1 and L2 are used to set the height of the two
auxiliary lines. Robot products will only recognize the lines in the screen surrounded
by two auxiliary lines.
SP: deflection tolerance. The larger the value set, the more the robot tends to go
straight.
COLOR: switching to search for white lines on black or black lines on white.
START: switching the visual tracking function.
2.5.4 PWM INIT SET module
Summary of Contents for PiCar-Pro
Page 1: ......
Page 13: ...10 2 Introduction of GPIO pins 1 GPIO pin comparison table...
Page 16: ...13 Raspberry Pi through a computer or directly to control the Arduino...
Page 26: ...23 3 Then click Finish 4 The software interface after opening is as shown below...
Page 30: ...27 6 Click CHOOSE SD 7 Then select the SD card we need to burn...
Page 41: ...38 Click CONTINUE WITHOUT PERMISSION...
Page 62: ...59 Controlling the switches of Port1 Port2 Port3 on the development board...
Page 67: ...64...
Page 99: ...96 x1 x1 x1 x1 x1 A set of acrylic...
Page 108: ...105 Prepare the acrylic panel and acrylic gasket as shown in the picture above...
Page 112: ...109...
Page 114: ...111 Use M2 5 12 screws and M1 7 6 6 self tapping screws to fix...
Page 116: ...113...
Page 117: ...114...
Page 118: ...115...
Page 121: ...118...
Page 123: ...120...
Page 127: ...124 Use M3 4 screws to fix two L shaped aluminum alloys...
Page 128: ...125 Use M3 4 screws to pass through the aluminum alloy and L aluminum alloy to fix the servo...
Page 130: ...127...
Page 135: ...132 shown below Use M3 10 screws to fix aluminum alloy and aluminum alloy sheet...
Page 136: ...133 Install the tire and fix it with M4 locknut...
Page 137: ...134 Install small LED lights...
Page 139: ...136...
Page 141: ...138...
Page 142: ...139...
Page 145: ...142...
Page 147: ...144 Install the inner 4mm coupling and fix it with screws...
Page 153: ...150...
Page 154: ...151 The installation is complete 9 5 Circuit Wiring Diagram Robot HAT board interface diagram...
Page 168: ...165 Execution function 1 if __name__ __main__ 2 radar_scan 3 GPIO cleanup...
Page 177: ...174 Adeept is the name of the WIFI hotspot 12345678 is the password of the WIFI hotspot...
Page 178: ...175...







































































