





























Note
Action
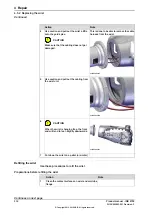
Remove any tool or other equipment fitted
on the turning disk or wrist.
2
Jog the robot to the specified position:
•
Axis 1: no significance (as long as
the robot is secured to the founda-
tion)
•
Axis 2: -65°
•
Axis 3: +65° (horizontal to the
foundation)
•
Axis 4: +90°
•
Axis 5: +90°
•
Axis 6: No significance.
The position of axis 2 and axis 3 is a recom-
mendation to get a good position for ser-
vice work on the wrist.
3
Mobile platform ladder
xx1500001985
Use a Mobile platform ladder (or similar) to
reach the wrist.
DANGER
Do not use the robot as ladder!
4
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
5
Retrieving access to the wrist cabling
Note
Action
DANGER
Make sure that all supplies for electrical
power, hydraulic pressure, and air pressure
are turned off.
1
Continues on next page
Product manual - IRB 8700
305
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.5.2 Replacing the wrist
Continued
Summary of Contents for IRB 8700 Series
Page 1: ...ROBOTICS Product manual IRB 8700...
Page 16: ...This page is intentionally left blank...
Page 824: ...This page is intentionally left blank...
Page 838: ...This page is intentionally left blank...
Page 840: ...This page is intentionally left blank...
Page 846: ......
Page 847: ......





















































