13
6.3 Sensors
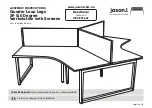
Example image of a combination consisting of a MATCH robot module, MATCH gripper, and MATCH storage station.
Check up to two sensors in the storage position to see whether the MATCH gripper is present in the MATCH storage station.
Then move the MATCH robot module onto the MATCH gripper from above. The centering pins of the MATCH gripper help
in insertion.
The robot, along with the MATCH robot module and MATCH gripper, moves to the inspection position sensors in the
MATCH storage station.
The two sensors in the inspection position (test channel) respond if the lockings are extended and make contact in the
MATCH robot module.
When the MATCH robot module and MATCH gripper are joined, the internal spring-pin contacts for signal transmission are
contacted.
Then the Connect LED changes color from red to green and a Connect signal (depending on the variant) is passed to the
higher-level control system.
NOTICE
Non-compliance may result in material damage.
A camera can be mounted on installation size LWR50F-08-01-A. There must be sufficient clearance between the
camera and MATCH robot module to prevent collisions. The needed adapter plate is enclosed with the MATCH
robot module.
►
Install an adapter plate between the camera and MATCH robot module.
1
MATCH robot module for quick-change
system
2
MATCH gripper for quick-change system
3
MATCH storage station
bo
Locking
bq
Sensor in storage position (MATCH
gripper present)
br
Sensor in inspection position (test
channel, locking extended)
bq
br
3
1
bo
2
INSTALLATION AND OPERATION INSTRUCTIONS:
LWR50F
DDOC01074 / f
EN / 2023-06-05
Zimmer GmbH • Im Salmenkopf 5 •
77866 Rheinau, Germany •
+49 7844 9138 0 • www.zimmer-group.com
Содержание MATCH LWR50F
Страница 2: ......