















32
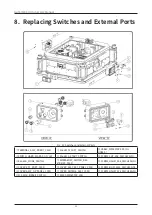
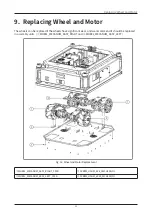
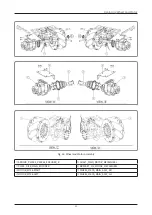
GoCart200 Omni Service Manual
126
30108700
LOG_ERR
SLAM failed to sync the map file
127
30113100
LOG_ERR
SLAM failed odometry interpolation
128
30205100
LOG_ALERT
Localization needs to set filename
129
30205300
LOG_ALERT
Localization needs to check extrinsics data
130
30206400
LOG_ERR
Localization failed to send pose requesting
131
30207300
LOG_ALERT
Localization got null pointer
132
30305100
LOG_ERR
Mapper needs to set directory name
133
30305300
LOG_ERR
Mapper found invalid clean map
134
40102500
LOG_ERR
Map callback function got empty data
135
40105200
LOG_ERR
Map broker can not find desired parameter field
136
40106200
LOG_ERR
Getting current map subscriber can not get response
137
40106400
LOG_ERR
Can not change map
138
40112100
LOG_ERR
Can not change the mode from SLAM to LOC because
there is no usable map.
139
40202300
LOG_ERR
Local gridmap is out of global gridmap boundary.
140
40202400
LOG_ERR
Local gridmap is wrong
141
402054nn
LOG_ERR
Map saving failed
142
40212200
LOG_ERR
Map save command is allowed only SLAM mode
143
40302500
LOG_ERR
Can not get map name
144
40306100
LOG_ERR
Can not make connection for pose manager
145
40306500
LOG_ERR
Pose manager found mismatched size of transfered
data
146
40402200
LOG_ALERT
Local map got wrong map ID
147
40402600
LOG_ALERT
Local map got invalid data
148
40412100
LOG_ALERT
Local map failed init
149
40502500
LOG_ERR
Mapper got empty global map
150
40503100
LOG_ERR
Mapper can not get available storage block
151
40505300
LOG_ERR
Mapper got wrong parameter value
152
40512100
LOG_ERR
Mapper could not enable or disable the procedure
153
40513100
LOG_ERR
Mapper found the map_size mismatched
154
40605300
LOG_ALERT
Border found that the drive type is wrong
155
40606100
LOG_ALERT
Border can not make connection for subscribe
156
406087nn
LOG_ERR
Border found an error during re-makeup group
157
50102600
LOG_ALERT
Motion have to get two values
158
50202600
LOG_ALERT
The number of joint have to be two for motion.
159
50304200
LOG_ERR
Motion docking has been timeout
160
50309200
LOG_ERR
Motion docking didn't contact with charging terminal
161
50310200
LOG_ERR
The number of retrying count for motion docking is
exceeded
162
50408500
LOG_ERR
Motion docking could not find any marker IDs
163
50409200
LOG_ERR
Motion docking lost marker
164
50508300
LOG_ERR
Motion docking could not get the electrical current
data from the charging terminal
165
50602800
LOG_ALERT
Can not move without destination point