





























4
-8
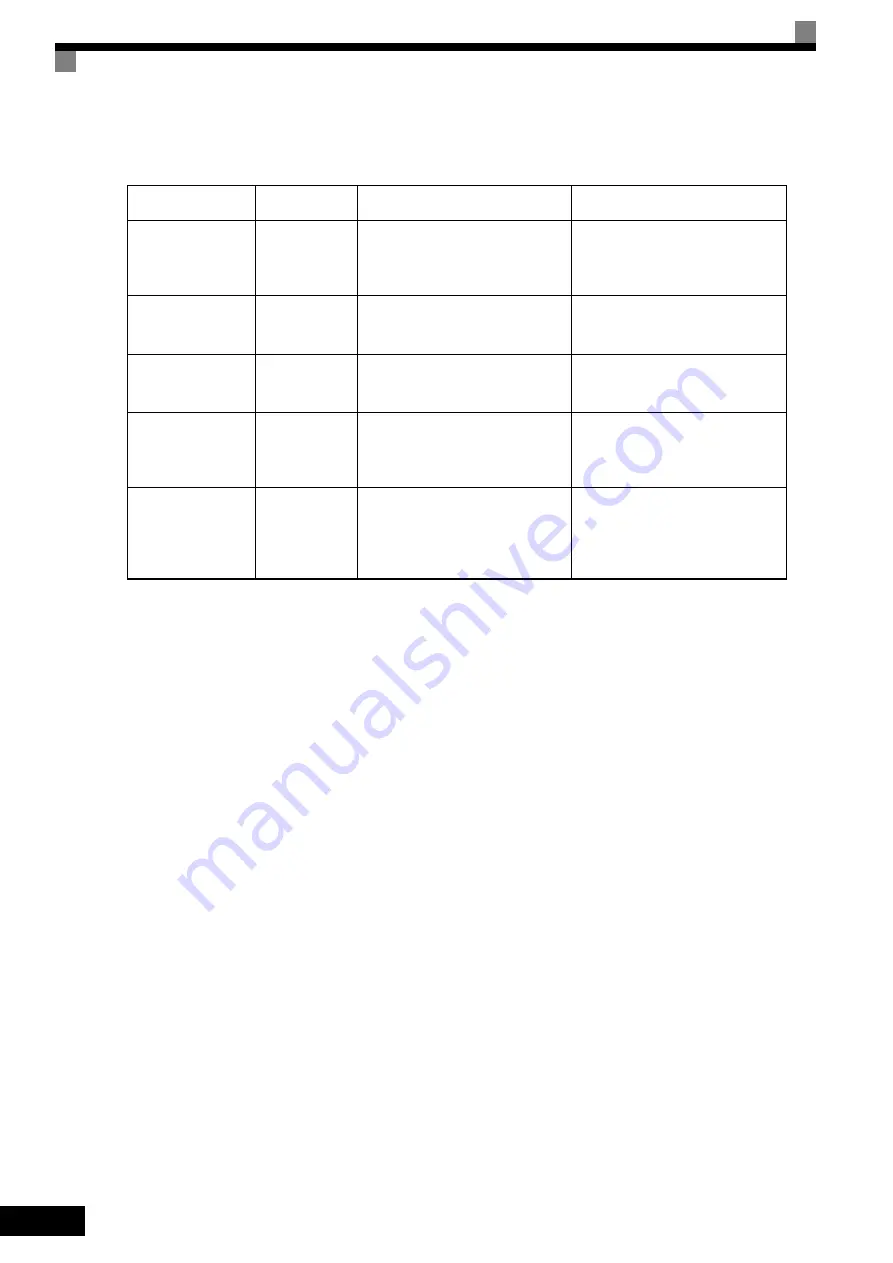
Setting the Control Method
Any of the following five control methods can be set.
Note With vector control, the motor and Inverter must be connected 1:1. The motor capacity for which stable control is possible is 50% to 100% of the capac-
ity of the Inverter.
V/f Control (A1-02 = 0)
•
Set either one of the fixed patterns (0 to E) in E1-03 (V/f Pattern Selection) or set F in E1-03 to specify a
user-set pattern as required for the motor and load characteristics in E1-04 to E1-13 in advanced program-
ming mode.
•
Perform stationary autotuning for the line-to-line resistance only if the motor cable is 50 m or longer for
the actual installation or the load is heavy enough to produce stalling. Refer to the following section on
Autotuning
for details on stationary autotuning.
V/f Control with PG (A1-02=1)
•
Set either one of the fixed patterns (0 to E) in E1-03 (V/f Pattern Selection) or set F in E1-03 to specify a
user-set pattern as required for the motor and load characteristics in E1-04 to E1-13 in advanced program-
ming mode.
•
Set the number of motor poles in E2-04 (Number of Motor Poles)
•
Set the number of rotations per pulse in F1-01 (PG Constant). If there is a reduction gear between the
motor and PG, set the reduction ratio in F1-12 and F1-13 in advanced programming mode.
Control Method
Constant Set-
ting
Basic Control
Main Applications
V/f control
A1-02 = 0
Voltage/frequency ratio fixed control
Variable speed control, particularly
control of multiple motors with one
Inverter and replacing existing Invert-
ers
V/f control with PG A1-02 = 1
Voltage/frequency ratio fixed control
with speed compensation using a PG
Applications requiring high-precision
speed control using a PG on the
machine side
Open-loop vector 1
control
A1-02 = 2
(factory setting)
Current vector control without a PG
Variable speed control, applications
requiring speed and torque accuracy
using vector control without a PG
Flux vector control A1-02 = 3
Flux vector control
Very high-performance control with a
PG (simple servo drives, high-preci-
sion speed control, torque control, and
torque limiting)
Open-loop vector 2
control
A1-02 = 4
Current vector control without a PG
with an ASR (speed controller)
(Always perform rotational autotun-
ing.)
Very high-performance control with-
out a PG (torque control without a PG,
torque limiting, applications requiring
a 1:200 speed control range without a
PG)
Simple operation of a general-purpose
motor at 50 Hz:
E1-03 = 0
Simple operation of a general-purpose
motor at 60 Hz:
E1-03 = F (default) or 1
If E1-03 = F, the default setting in the user setting from
E1-04 to E1-13 are for 60 Hz
Simple operation of a general-purpose
motor at 50 Hz:
E1-03 = 0
Simple operation of a general-purpose
motor at 60 Hz:
E1-03 = F (default) or 1
If E1-03 = F, the default setting in the user setting from
E1-04 to E1-13 are for 60 Hz







































































